

Robot active bracket for assisting minimally invasive surgical operation
A minimally invasive surgery and robotics technology, applied in surgery, micro-manipulators, manipulators, etc., can solve the problems of difficulty in ensuring accuracy, affecting the motion accuracy and stiffness of robots, and achieve the effect of ensuring safety, light weight and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0026] The active stent for the robot assisting minimally invasive surgery of the present invention will be described in detail below in conjunction with specific embodiments.
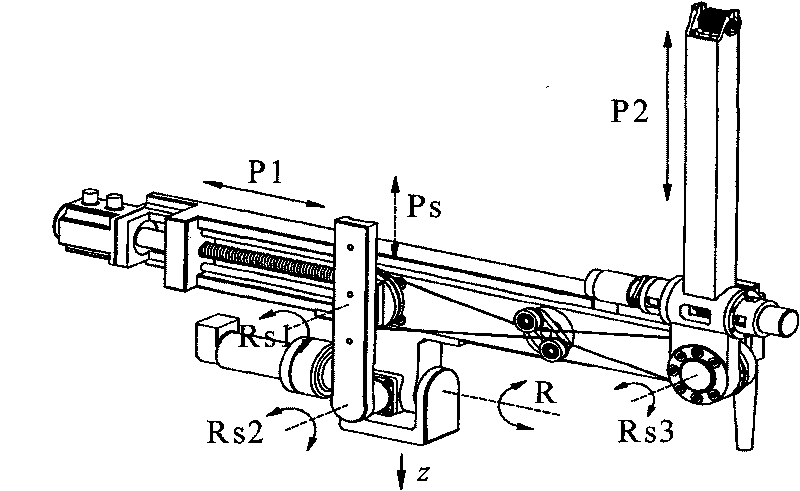
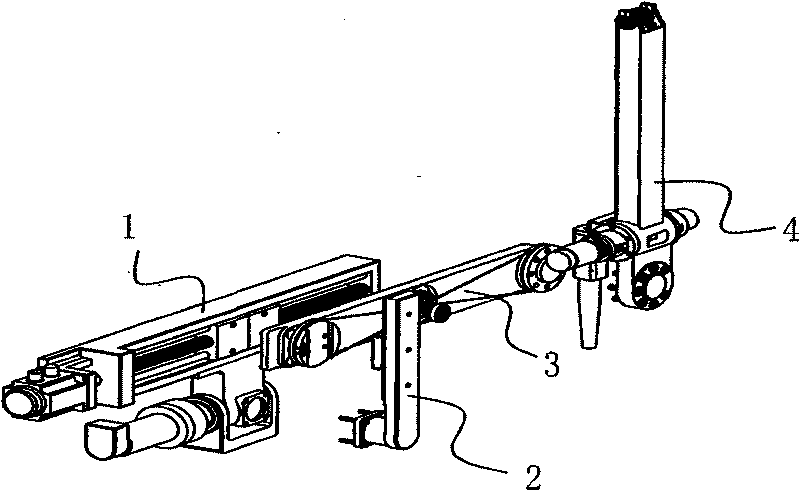
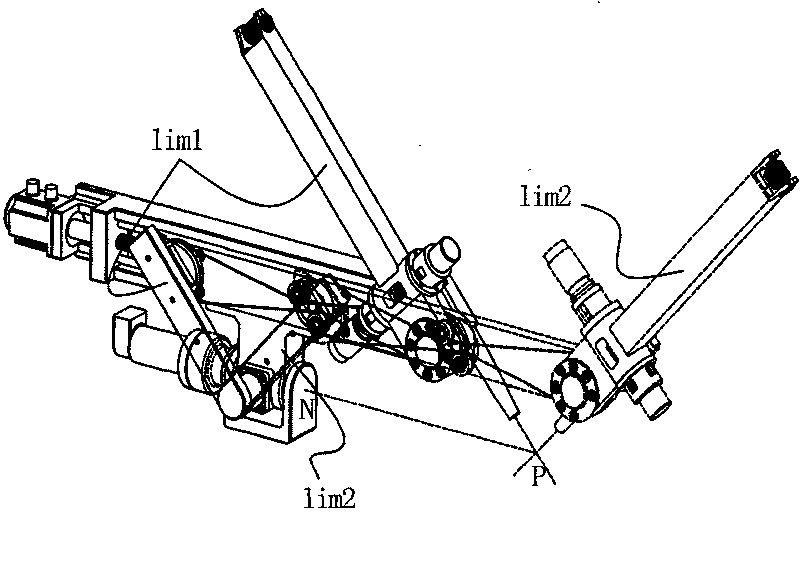
[0027] figure 1 , figure 2 , image 3 Shown is a schematic diagram of the overall structure of the present invention, and R, P1, and P2 in the illustration describe three active joints of the present invention, wherein R is a rotating joint, and P1, P2 are moving joints. The illustrated Rs1, Rs2, Rs3, and Ps describe the follow-up joints of the present invention, wherein Rs1, Rs2, and Rs3 are follow-up rotation joints, and Ps is a follow-up movement joint; each active joint and follow-up joint will be described in the following Details in the content. figure 2 The various components of the present invention are described, including the base part 1, the adjustmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More