

A robotic arm for assisting minimally invasive surgery
A surgical robot and minimally invasive surgery technology, applied in the field of robotic manipulators, can solve problems such as affecting the motion accuracy and stiffness of the robot, reducing the friction force of wire transmission, and losing the function of transmission, and achieve high system rigidity, weight reduction, and appearance. concise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
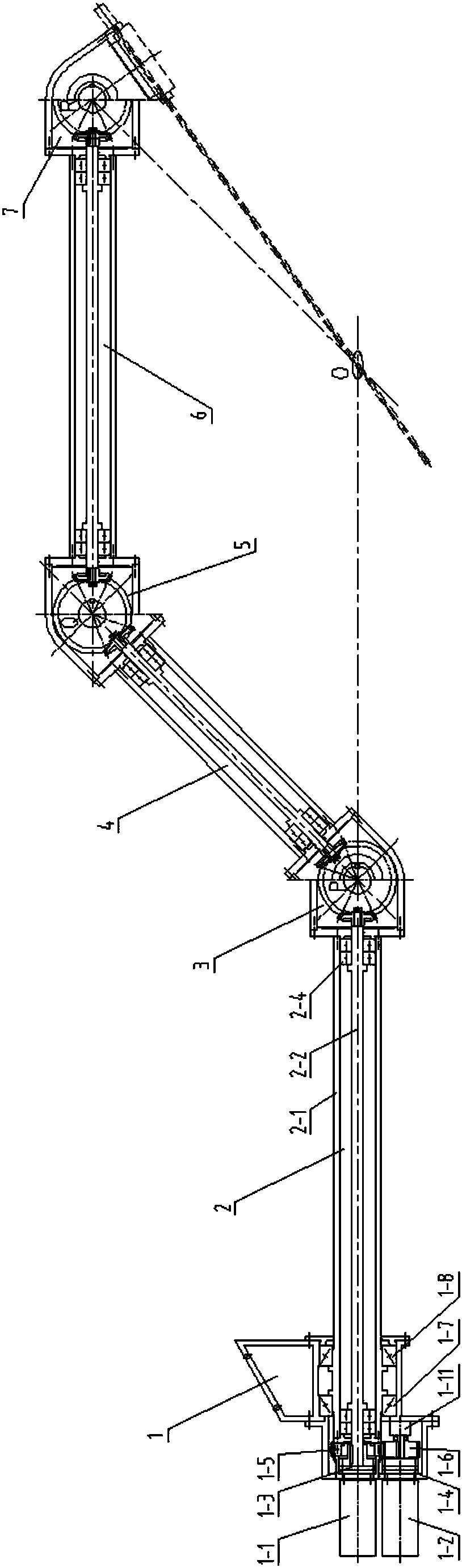
[0042] like figure 1 , figure 2 As shown, the present invention provides a robotic arm for assisting minimally invasive surgery with precise transmission, high reliability, large motion range, high system rigidity, and long service life, which has a simple appearance, miniaturization, and light weight. It includes arm I2, arm II4, and arm III6 connected in sequence; arm I2 and arm II4 are connected through connecting device 3; arm II4 and arm III6 are connected through connecting device 5, and a driving device is provided at the free end of arm I2 1, specifically including two drive motors I1-1, II1-2, a connecting device 7 for connecting surgical tools is connected to the free end of the arm III6, the axes of the arm I and the arm III are parallel, and the arm II and the The axis of the connection seat VIII is parallel to the straight line parallel to the axis of the arm II, and the four constitute a "parallelogram" structure; the arm I drives the "parallelogram" structure ...
Embodiment 2
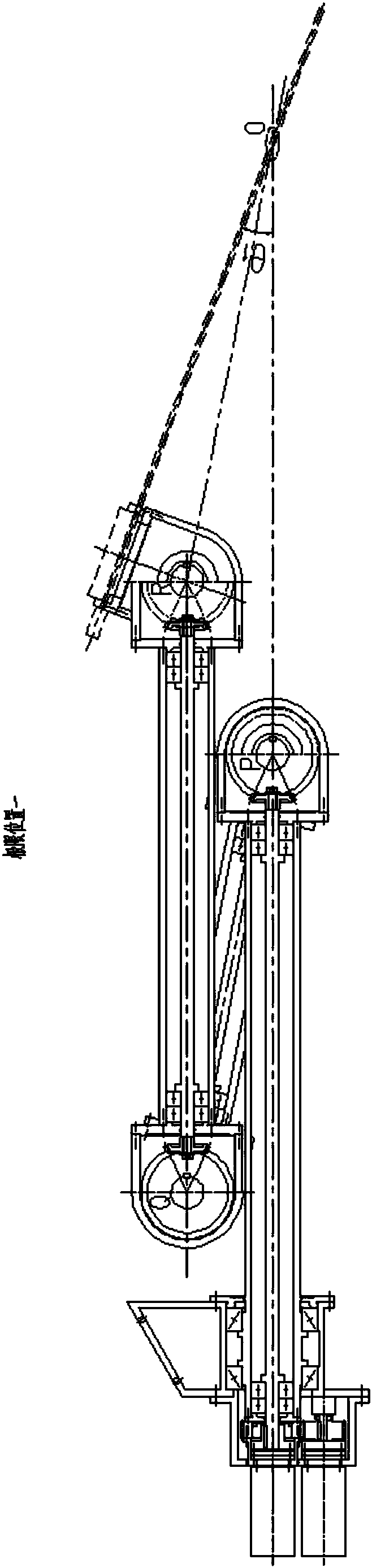
[0058] On the basis of the technical solution of Example 1, the connecting rod IV6-1 and the connecting rod II2-1 are respectively installed on the "both sides" of the connecting rod III4-1, the connecting rod II2-1, the connecting rod III4-1, the connecting rod Rod IV6-1 is designed with an appropriate length relationship so that when connecting rod III4-1 is rotated to an angle "parallel to the axis" of connecting rod II2-1, neither connecting seat V5-1 nor connecting seat VI5-2 will be connected to connecting seat I1 "Interference"; when the connecting rod IV6-1 rotates to an angle "parallel to the axis" of the connecting rod III4-1, neither the connecting seat VII7-1 nor the connecting seat VIII7-2 is in contact with the connecting seat III3-1 and the connecting seat IV3-2 "put one's oar in". Connecting rod III4-1 and connecting rod IV6-1 can swing to the "both sides" of connecting rod II2-1 (such as Figure 7 view direction), so that the connecting rod IV6-1 is rotated t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More