

Modular double-wheel driven mobile robot capable of changing wheel span and wheel direction
A mobile robot and two-wheel drive technology, applied in the field of robotics, can solve the problems of fixed body configuration and invariable wheelbase, and achieve strong environmental adaptability, low cost, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings, but the embodiments of the present invention are not limited thereto.
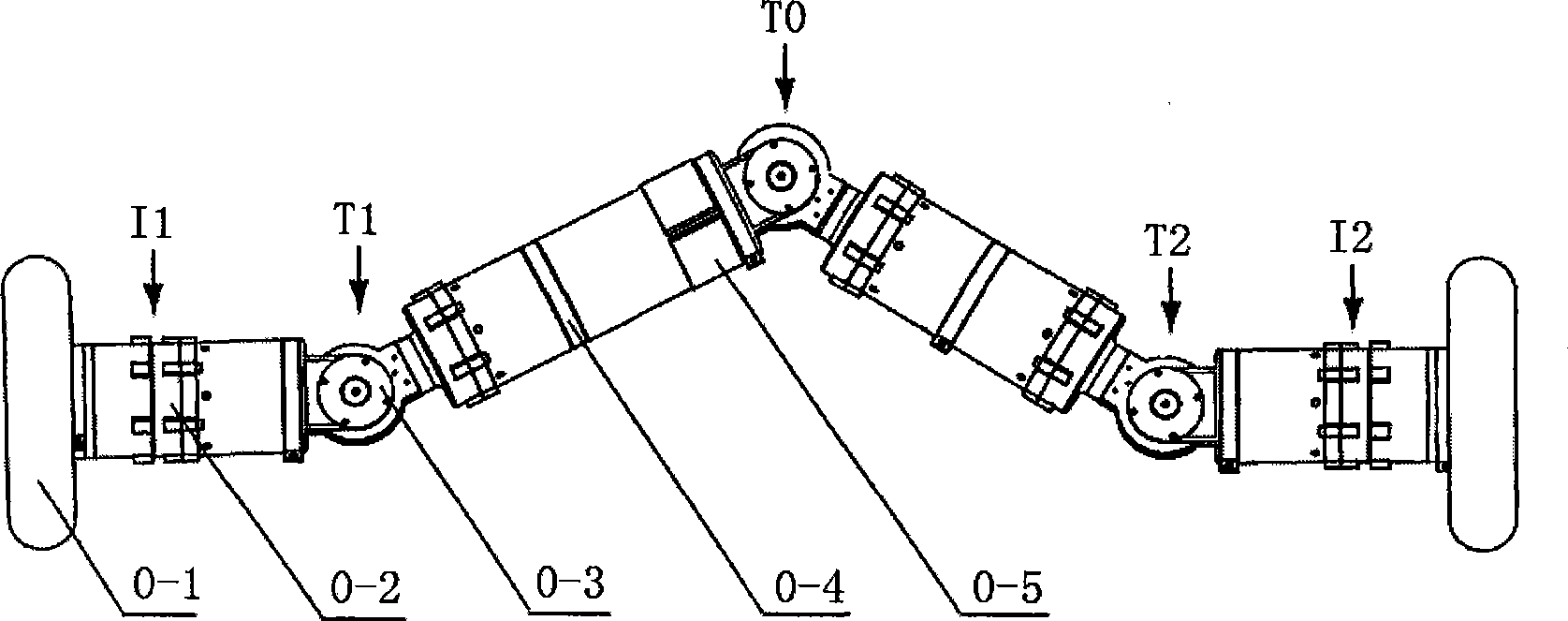
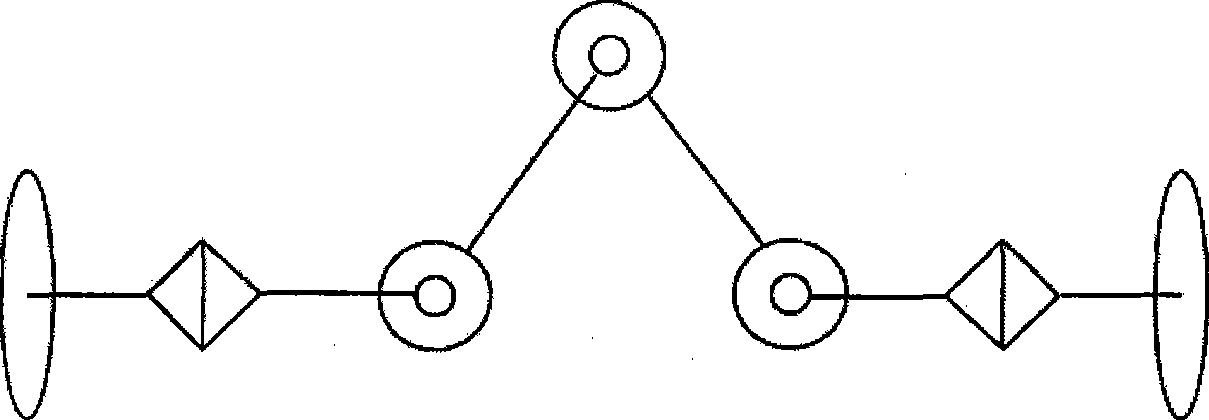
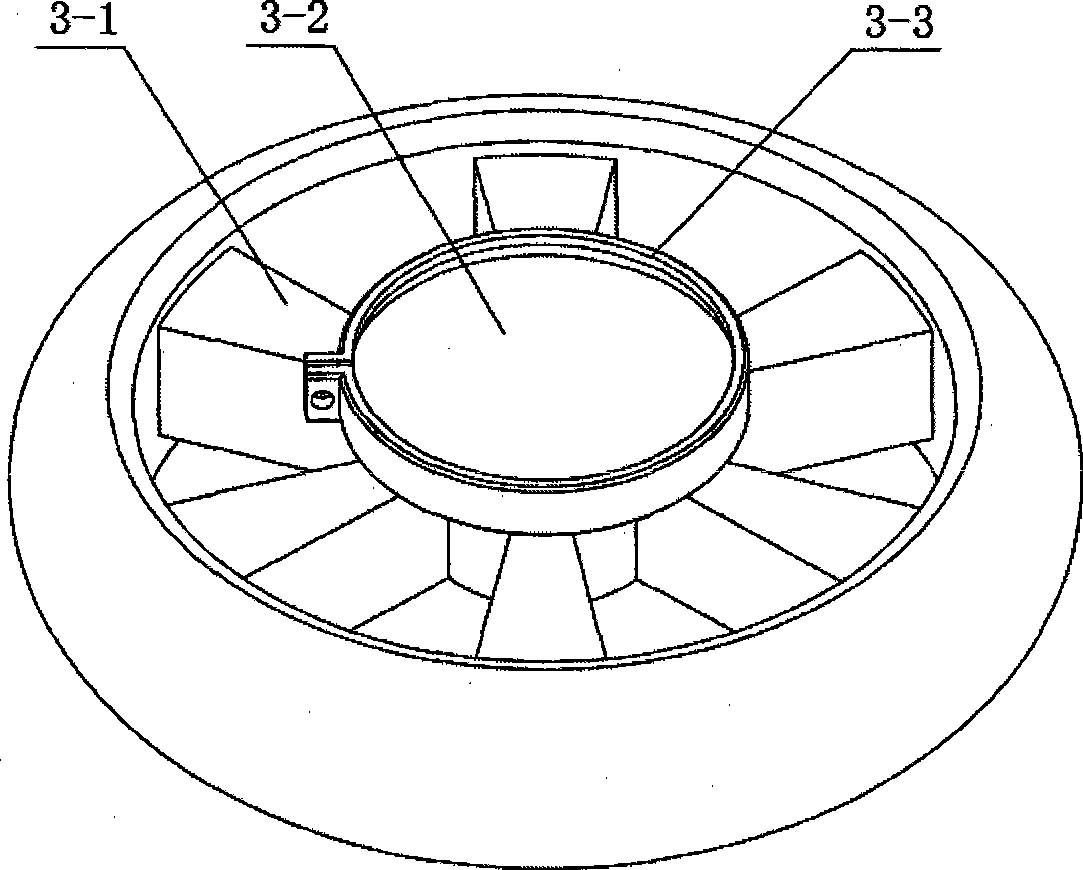
[0026] The robot of the present invention adopts five joints, including two I-type joints and three T-type joints, with two wheels at both ends. Each part is connected sequentially in series, the sequence is: wheel-I-joint-T-joint-T-joint-T-joint-I-joint-wheel, that is, there are three T-joints in the middle and one I-joint at each end. type joints. The rotation axes of the three T-joints are parallel to each other and perpendicular to the rotation axes of the I-type joints at both ends. The specific composition of the robot includes: two I-shaped joint modules, three T-shaped joint modules, two wheel modules, a connecting sleeve and a universal wheel. The universal wheels are fixed on the connecting sleeve in the middle of the robot through conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More