

Wheeled mobile device for foot for humanoid robot, polypodia walking vehicle
A humanoid robot and mobile device technology, applied in the field of foot wheeled mobile devices, can solve the problems of difficult control, difficult to move stably and quickly, and high energy consumption, and achieve the effects of easy control, compact structure, and reduced energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
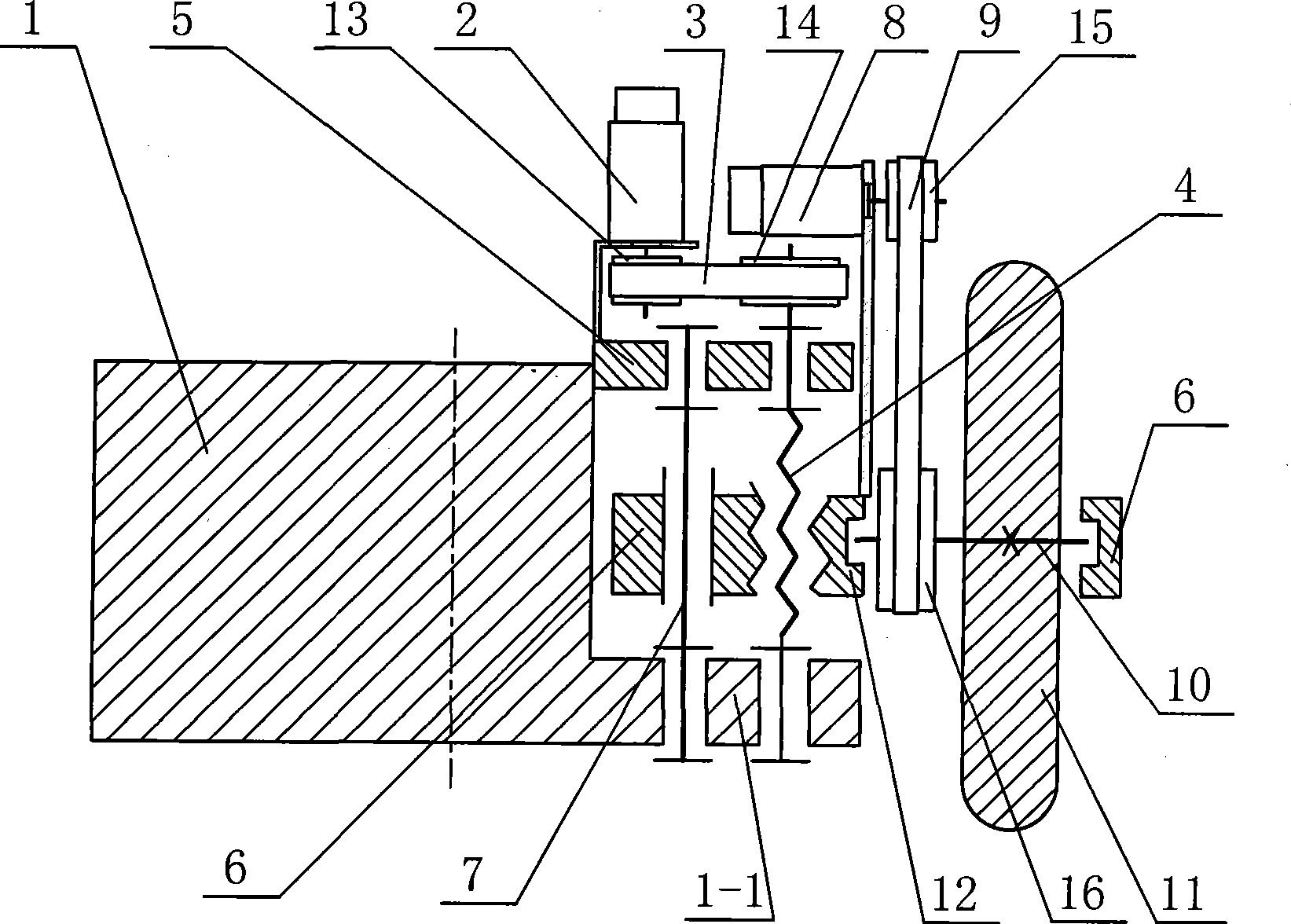
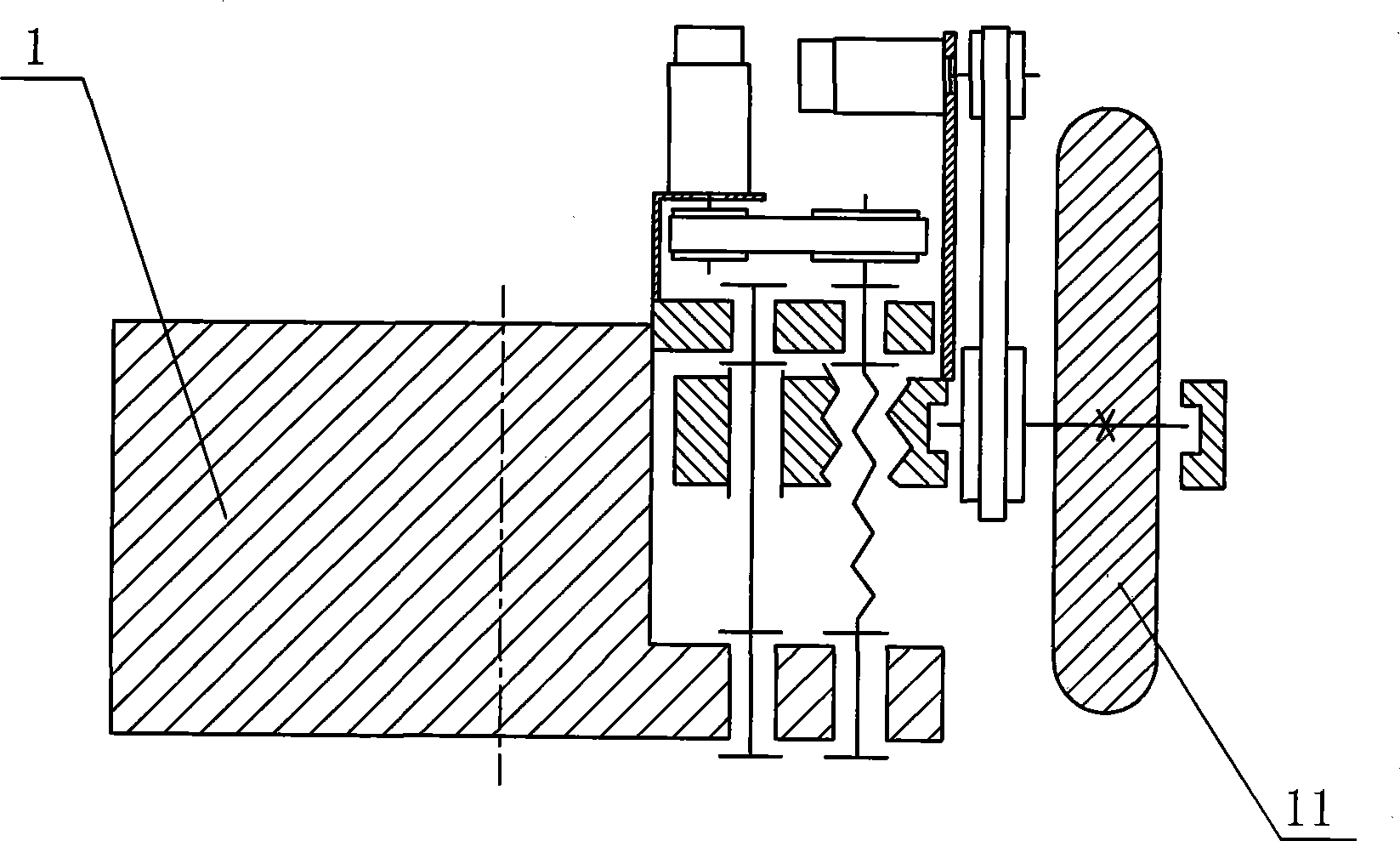
[0008] Specific implementation mode one: as Figure 1~2 As shown, the wheeled mobile device for humanoid robots and multi-legged walking machines described in this embodiment is composed of a mobile mode conversion mechanism and a wheeled mobile mechanism. The mobile mode conversion mechanism is composed of a guide column 7, a lifting Plate 6, support member 5, first driving motor 2, first pulley 13, first synchronous belt 3, second pulley 14, rotating screw rod 4 and nut 12 are formed; , the third pulley 15, the second synchronous belt 9, the fourth pulley 16, the support shaft 10 and the driving wheel 11; The top of the outer edge 1-1 provided on the bottom of the outer end surface of the foot 1 is fixedly connected with the foot 1, and the lifting plate 6 and the nut 12 are fixedly connected into one body, and the lifting plate 6 is set on the guide column 7, and the guide column 7 One end is installed on the outer edge 1-1, the other end of the guide column 7 is installed...
specific Embodiment approach 2
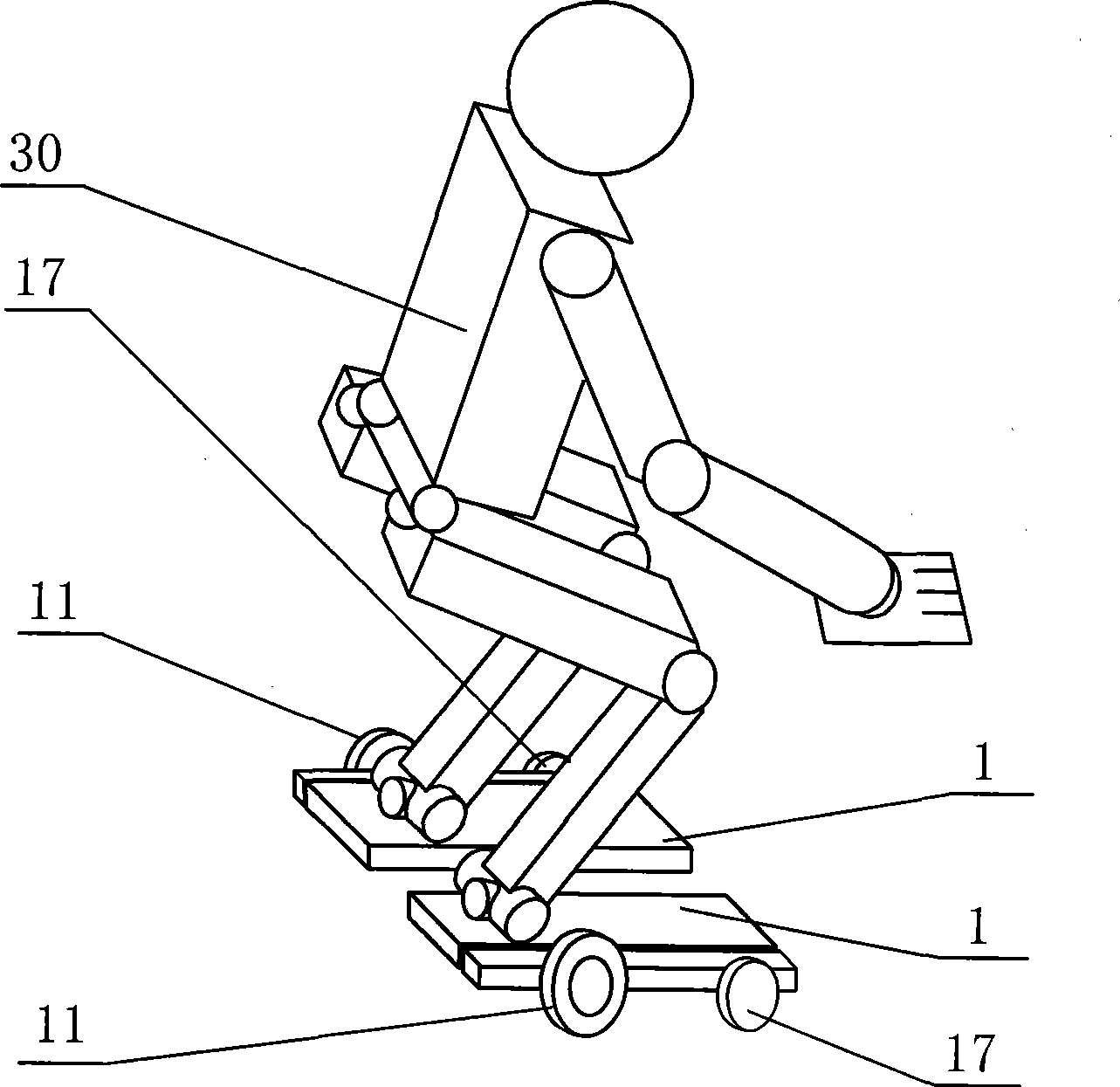
[0009] Specific implementation mode two: as Figure 1~3 As shown, the wheeled mobile device for feet in this embodiment also includes an auxiliary support wheel 17, the auxiliary support wheel 17 is installed on the outer end surface of the foot 1, and the auxiliary support wheel 17 is located on the side of the driving wheel 11. ahead. Auxiliary support wheels 17 are set to enhance the stability of humanoid robots and multi-legged walking machines when walking in a wheeled manner. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0010] Specific implementation mode three: as figure 1 , figure 2 and Figure 4 As shown, the wheeled mobile device for feet in this embodiment also includes two auxiliary support wheels 17, one of which is installed on the outer end surface of the foot 1, and the auxiliary support wheel 17 is located on the drive wheel 11 Another auxiliary support wheel 17 is installed on the outside end surface of the hand 18 on the same side as the pin 1 . The application of the wheeled mobile device for the feet in this embodiment realizes that the two hands of the humanoid robot are on the ground. At the same time, it is used for the left and right feet and the left and right hands to realize the four-wheel drive, which makes the humanoid robot more stable when walking in a wheeled way. Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More