

Propel mechanism of underactuated biped walk robot
A walking robot and walking mechanism technology, applied in the field of robots and underactuated biped walking robots, can solve the problems of low energy efficiency, complex control methods, complex design of biped robot mechanisms, etc., and achieve the effect of simple mechanism and high energy efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
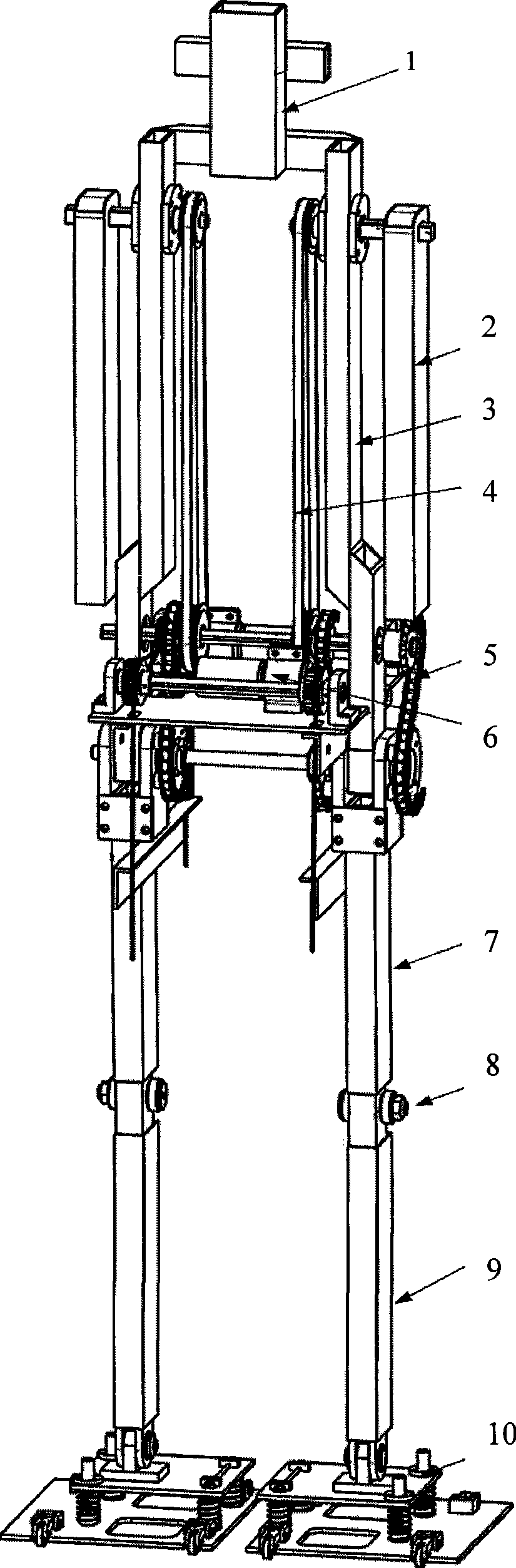
[0043] The invention realizes the mechanical design and control of the high-energy-efficiency mechanism of the underactuated biped walking robot from the four aspects of system structure design, mechanical design, control system development and walking control algorithm design. The technical solutions, design concepts and system working principles of the present invention will be further described in detail below in conjunction with the embodiments shown in the accompanying drawings.
[0044] The traditional biped robot mainly adopts the bionic design method. Firstly, it simulates each degree of freedom of human motion from the mechanical system structure, which makes the system mechanism and control complex. The present invention takes underactuated bipedal walking as the guiding ideology, and designs the walking mechanism and control system of the bipedal robot, so that the robot can realize a walking gait with high energy efficiency with a simple mechanism. The design point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More