

Movement mechanism of cam type pipe robot
A pipeline robot and motion mechanism technology, applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problems of small friction, difficulty in adapting to pipe bends, poor adaptability to pipe diameter changes of micro-miniature pipe robots, etc., to achieve Improve adaptability, solve poor pipeline adaptability, and enhance the ability to actively adapt to large-scale pipe diameter changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
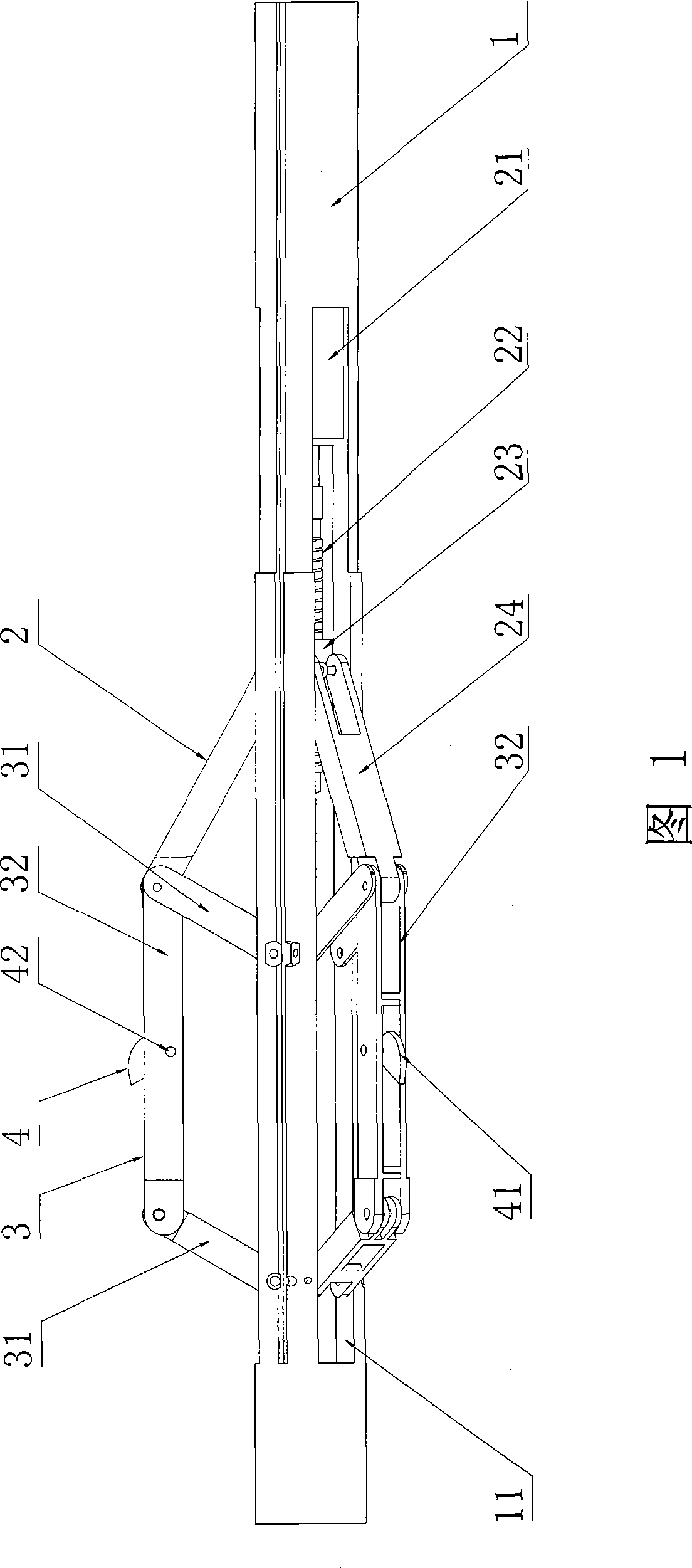
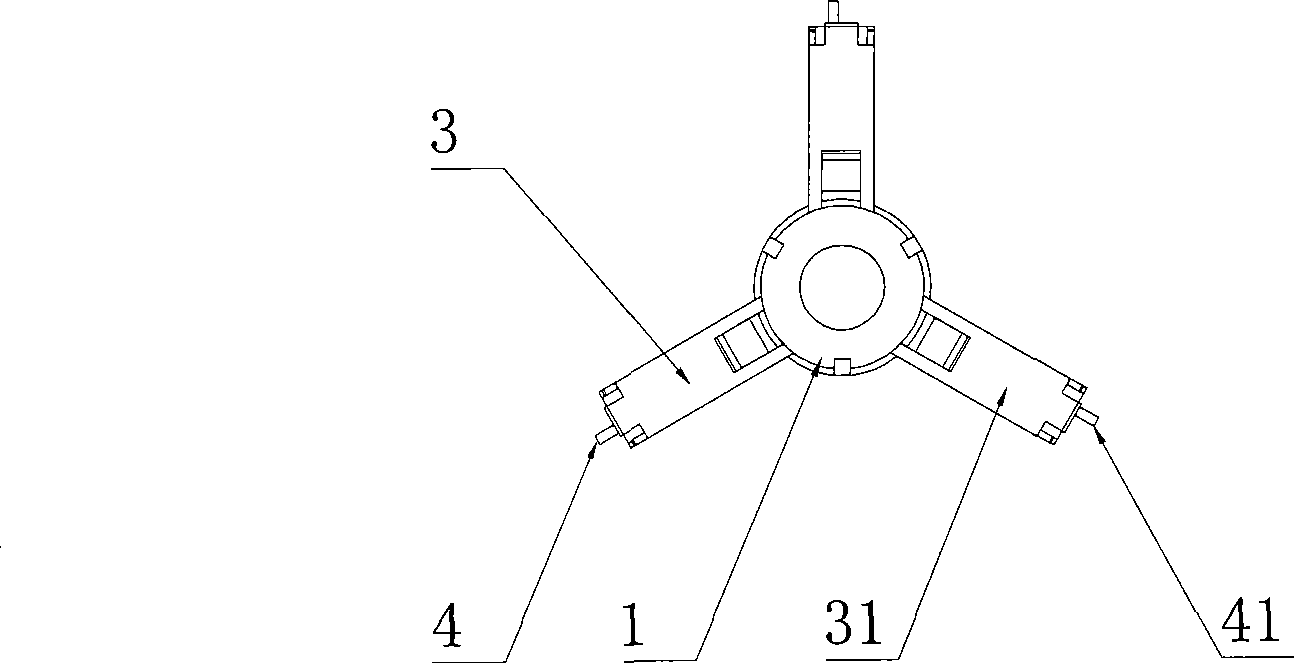
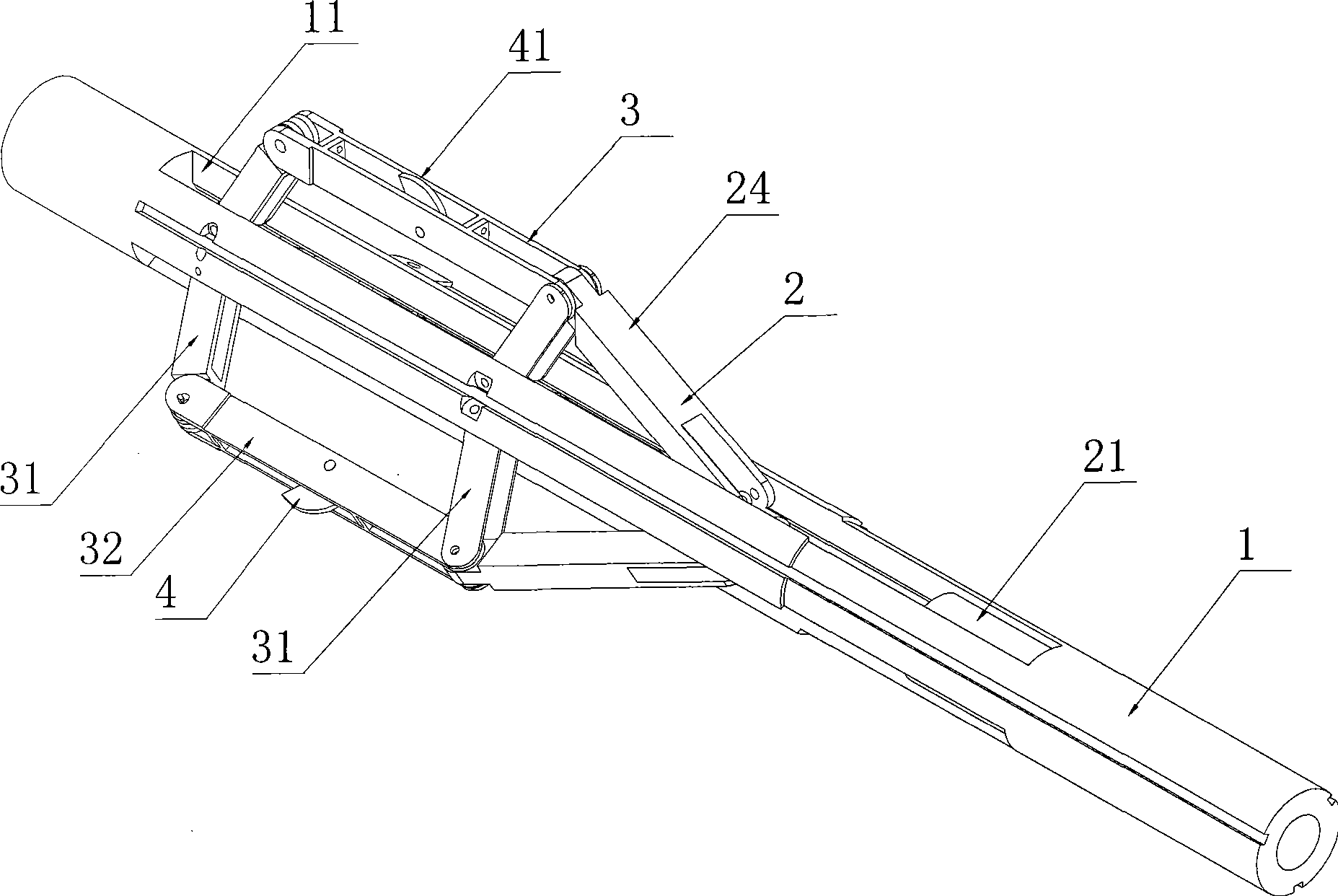
[0031] Figure 1 to Figure 7 As shown, the present invention discloses a cam-type pipeline robot motion mechanism, including a cylindrical support 1, on which three groups of parallelogram four-bar mechanisms 3 arranged at equal intervals along the circumferential direction and a group of driving parallelogram four-bar mechanisms 3 are installed. The drive mechanism 2 for the four-bar mechanism 3 to expand or retract, the cylindrical support 1 is provided with an accommodating groove 11 for accommodating the parallelogram four-bar mechanism 3 in the folded state, and each parallelogram four-bar mechanism 3 includes two rockers 31 and the connecting rod 32 connected between the two rocking bars 31, the two rocking rods 31 are respectively hinged with the cylindrical support 1, the connecting rod 32 is parallel to the central axis of the cylindrical support 1, and the middle parts of each connecting rod 32 are installed Cam mechanism 4 is arranged, and cam mechanism 4 comprises ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More