

Real time vision positioning method of monocular camera
A monocular camera and real-time vision technology, applied in the field of computer vision, can solve the problems of high cost of binocular vision positioning system, difficult stereo matching algorithm, poor accuracy, etc., achieve high accuracy, reduce system complexity and cost , the effect of small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
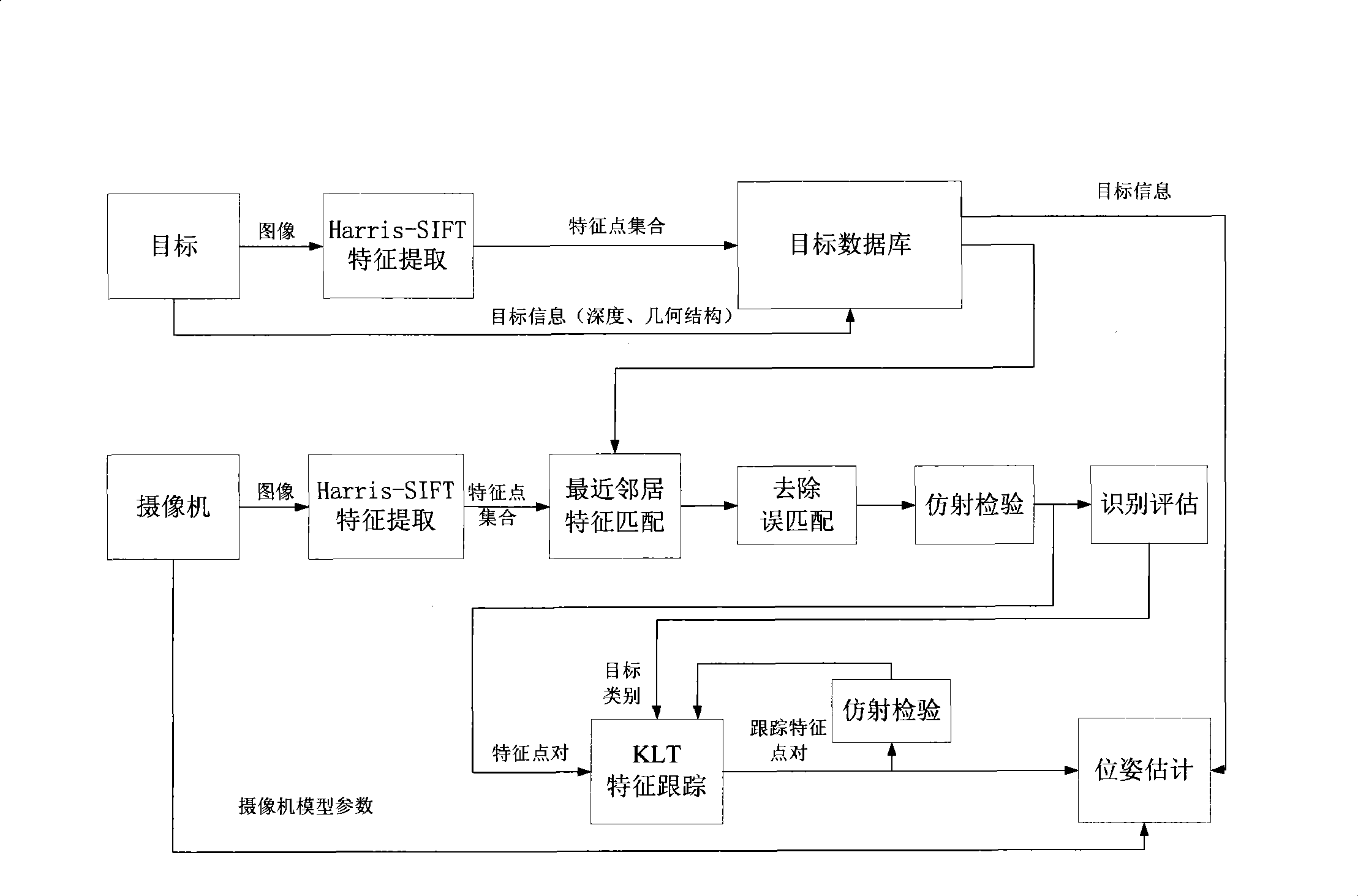
[0020] Such as figure 1 Shown, the concrete flow process of method of the present invention is as follows:
[0021] 1. The target image is obtained through the Harris-SIFT (Distinctive image features from scale-invariant keypoints [J]. International Journal on Computer Vision, 2004, 60(2): 91-110.) feature extraction method to obtain a set of feature points. The method is composed of Harris-SIFT feature extraction operator, which extracts the set of feature points through the invariant feature in the image and stores them in the target database.
[0022] The target image can be loaded in advance, or can be acquired by the camera in real time.
[0023] 2. According to the target category, the target image information including depth information and geometric structure information is written into the database file and stored i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More