

Three-arm buttjunction module flat lattice type self-reorganization robot
A docking module and self-reconfiguration technology, applied in the direction of claw arms, joints, manipulators, etc., can solve the problems of high power consumption, no invention, and high cost of memory alloys, and achieve a compact internal structure, easy to implement, and convenient and firm docking Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
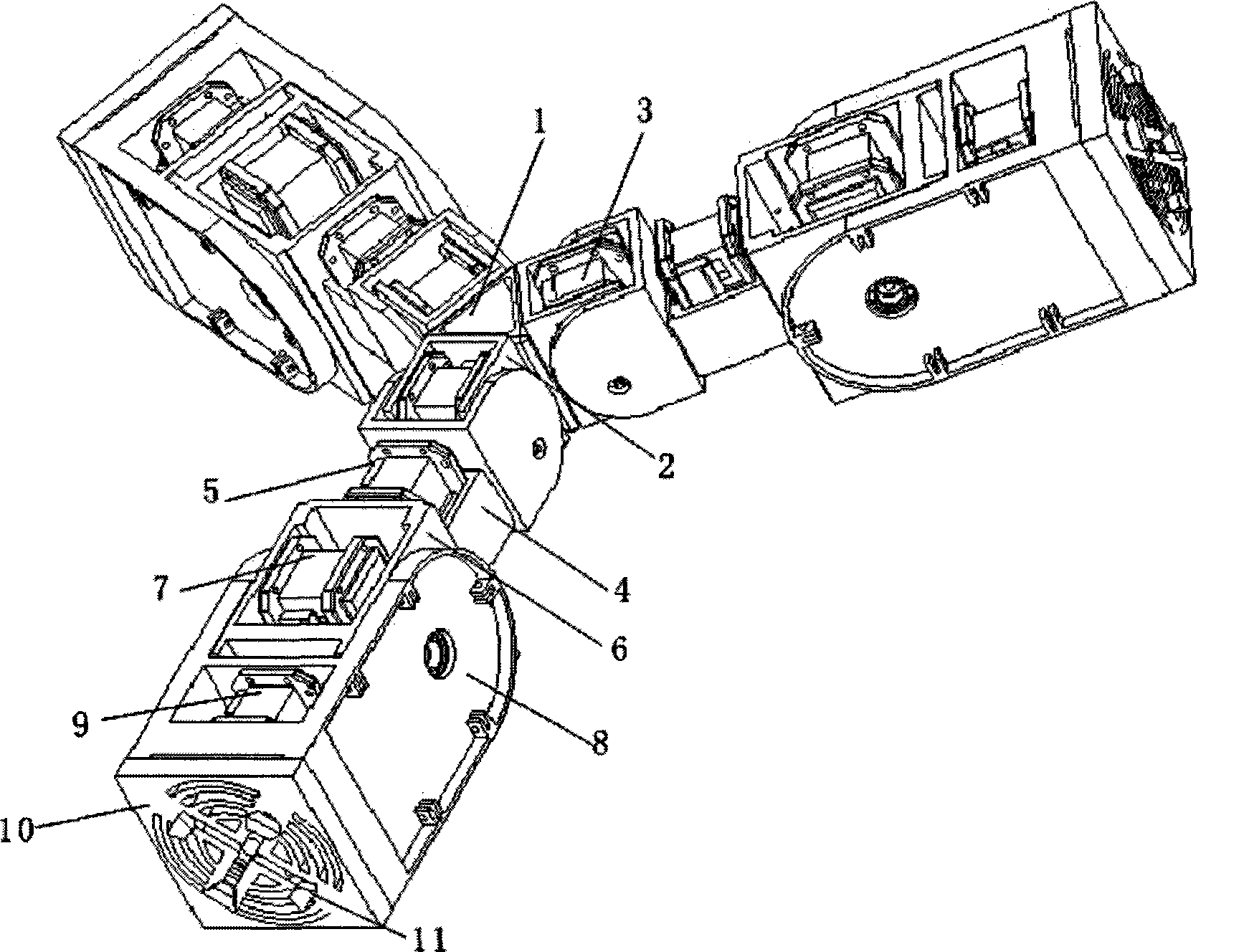
[0025] Such as figure 1 , 2As shown, this embodiment includes: a central frame body 1 and several docking single arms, wherein the central frame body 1 is an equilateral triangular prism, each side of the equilateral triangular prism is fixedly connected with a docking single arm respectively, and each The docking single arm includes: the first inner frame 2, the first turning motor 3, the middle frame 4, the rotating motor 5, the second inner frame 6, the second turning motor 7, the outer frame 8, the docking surface device, the first inner frame The frame 2 is fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More