

Method for orientating secondary pixel edge of oval-shaped target
A sub-pixel edge and positioning method technology, applied in image analysis, image data processing, instruments, etc., can solve time-consuming problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
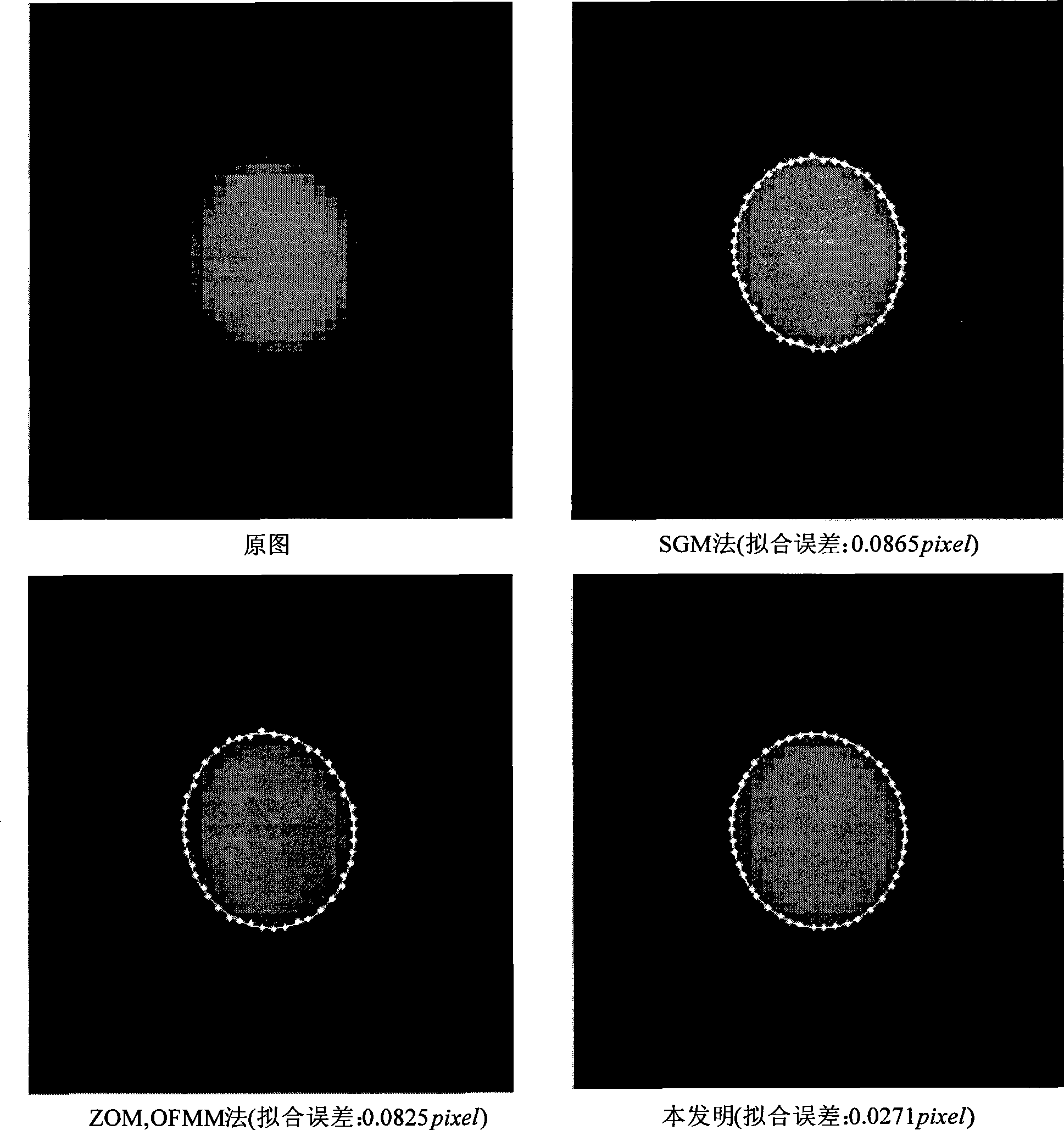
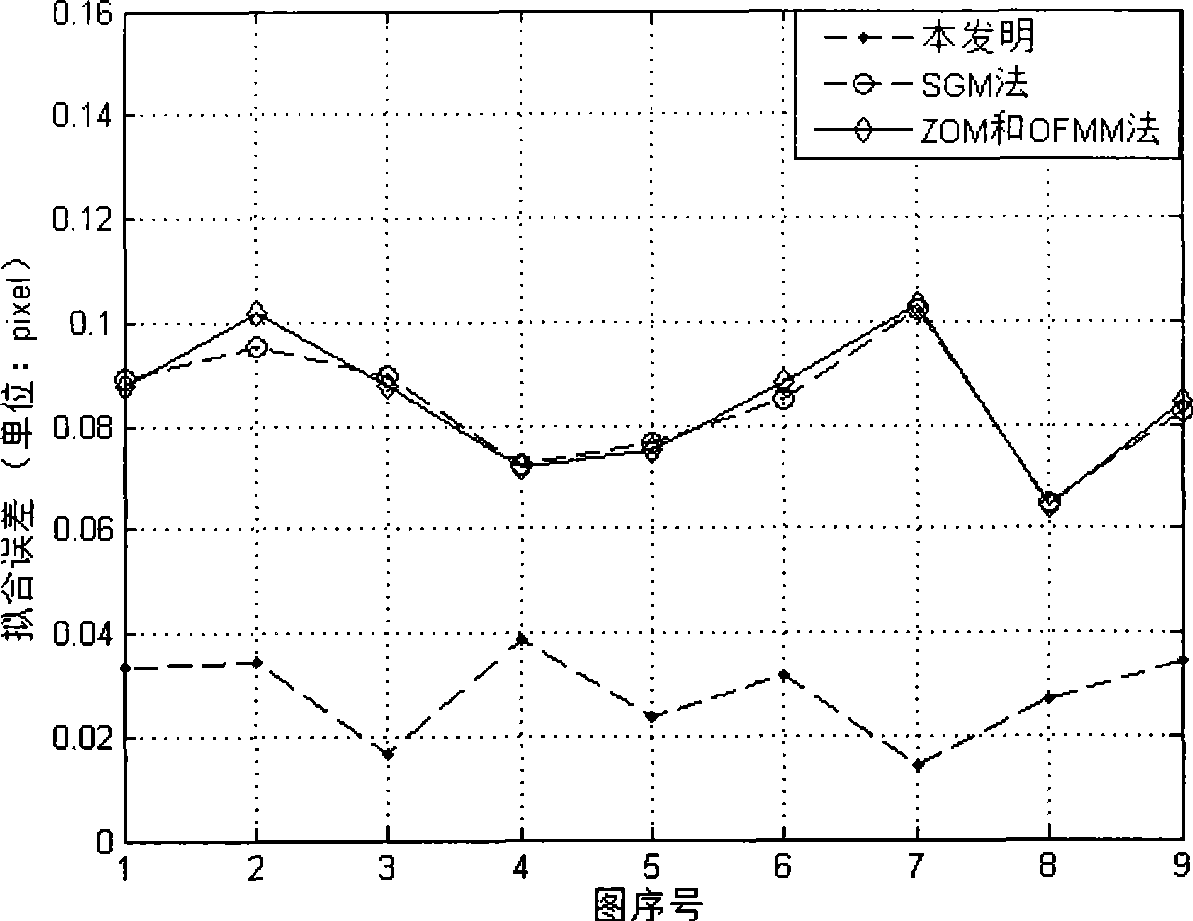
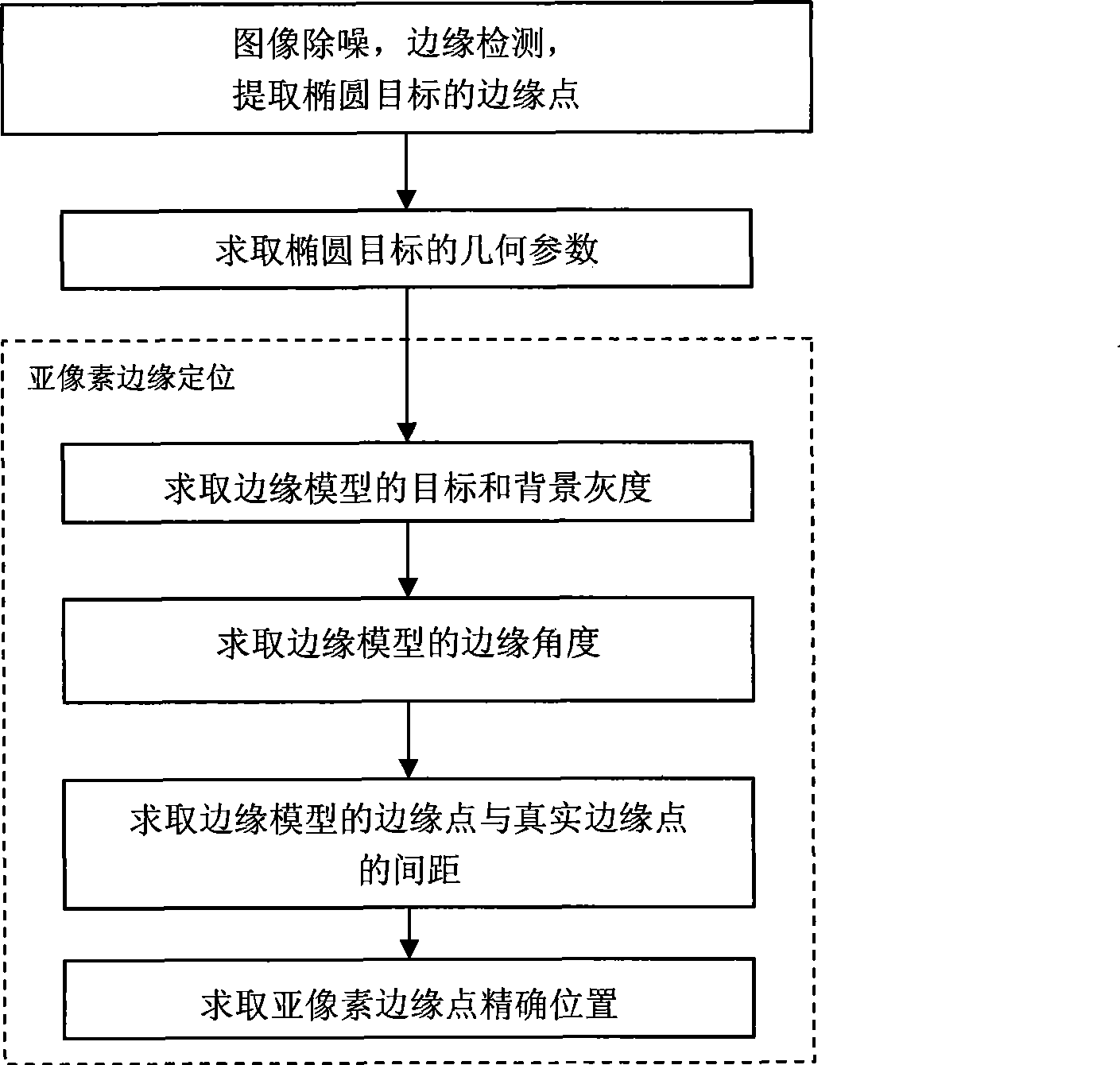
[0063] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. Applying this method to locate the sub-pixel edge of an ellipse object mainly includes three steps: detecting the pixel-level edge of the ellipse object, calculating the geometric parameters of the ellipse, and locating the sub-pixel edge. The flow chart of the specific steps is as follows: image 3 As shown, the specific steps for applying this method to locate the sub-pixel edge of an ellipse target are as follows:
[0064] Step 1: Denoise the image, perform Sobel operator edge detection, then extract the edge points of the ellipse object, record the total number of edge points count_pixel, and store the coordinates of the pixel-level edge points, expressed as (x p ,y p ), p=1, 2, 3...count_pixel, wherein, the pixel-level edge point indicates that the coordinates of the edge point are at the integer pixel level;
[0065] Step 2: Use the ed...
Embodiment 2
[0115] According to above-mentioned method, adopt the present invention to such as Figure 7 The actual image shown contains an elliptical target for sub-pixel edge location, the specific process is as follows:
[0116] Step 1: Denoise the image, detect the edge of the Sobel operator, and then extract the edge points of the ellipse object. The extracted ellipse edge points are as follows Figure 8 As shown, record the total count_pixel of edge points, at this time, count_pixel=47; store the coordinates of pixel-level edge points, expressed as (x p ,y p ), p=1, 2, 3...count_pixel, wherein, the pixel-level edge point indicates that the coordinates of the edge point are an integer pixel level, and the stored pixel-level edge point coordinates are shown in Table 6;
[0117] Step 2: Use the edge points of the ellipse target extracted in the first step, and use the method of least squares to fit the edge points to obtain the general equation x of the ellipse 2 +A e xy+B e the y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More