

Moving satellite orientation method for fast recovery type satellite communication system uninterrupted in moving
A technology of moving through and moving base alignment, applied in the direction of using feedback control, electrical components, antennas, etc., can solve the problem of long process of finding satellites for the control system, unable to find satellites, etc., to improve the rapidity and accuracy, overcome the delay of dynamic response, and improve the effect of fast response ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The fast-recovery on-the-fly communication and on-the-fly satellite alignment method of the present invention solves the problems of fast moving base alignment of an inertial navigation system and fast response and closed-loop scanning of a control system in a dynamic environment.
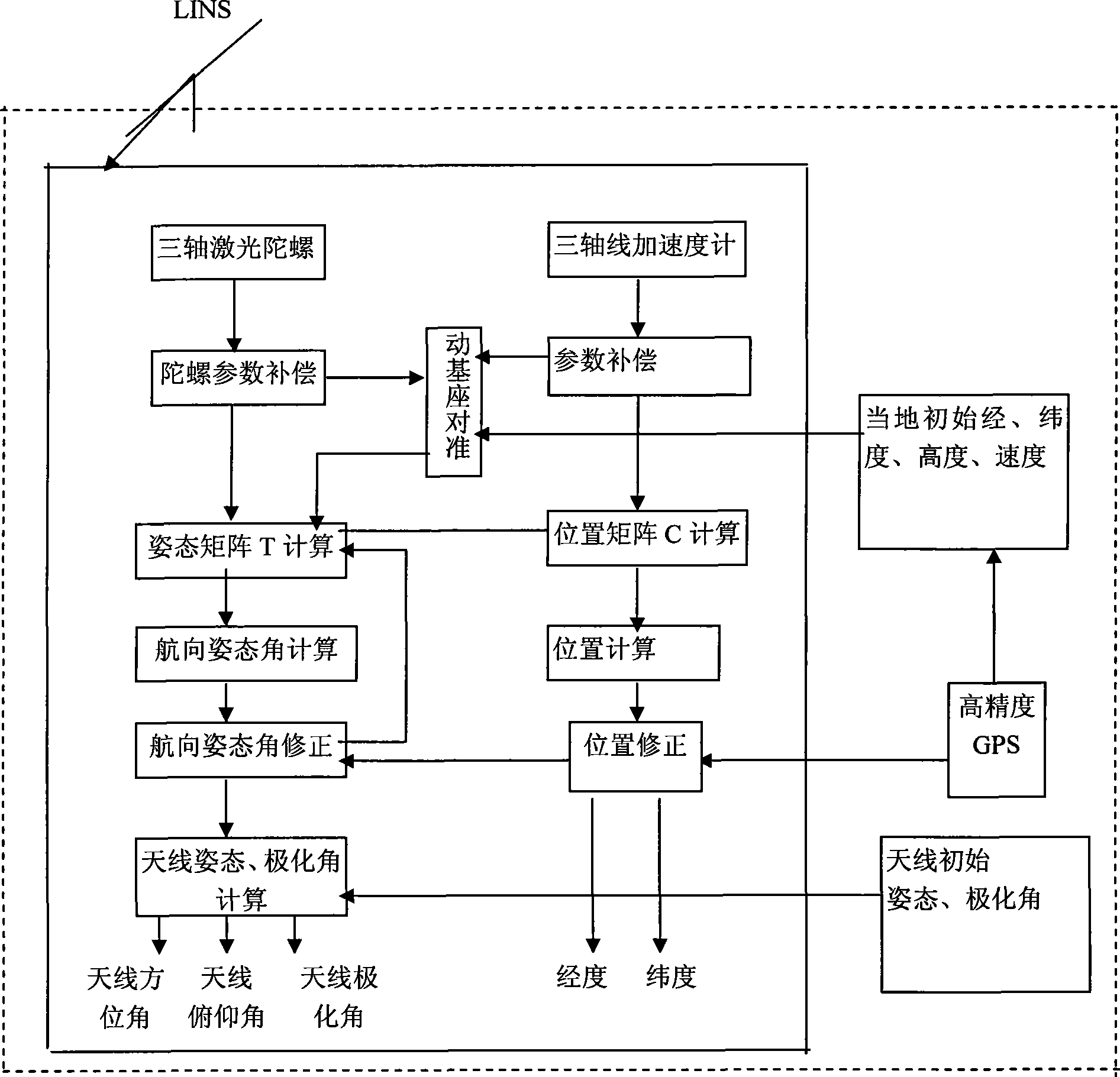
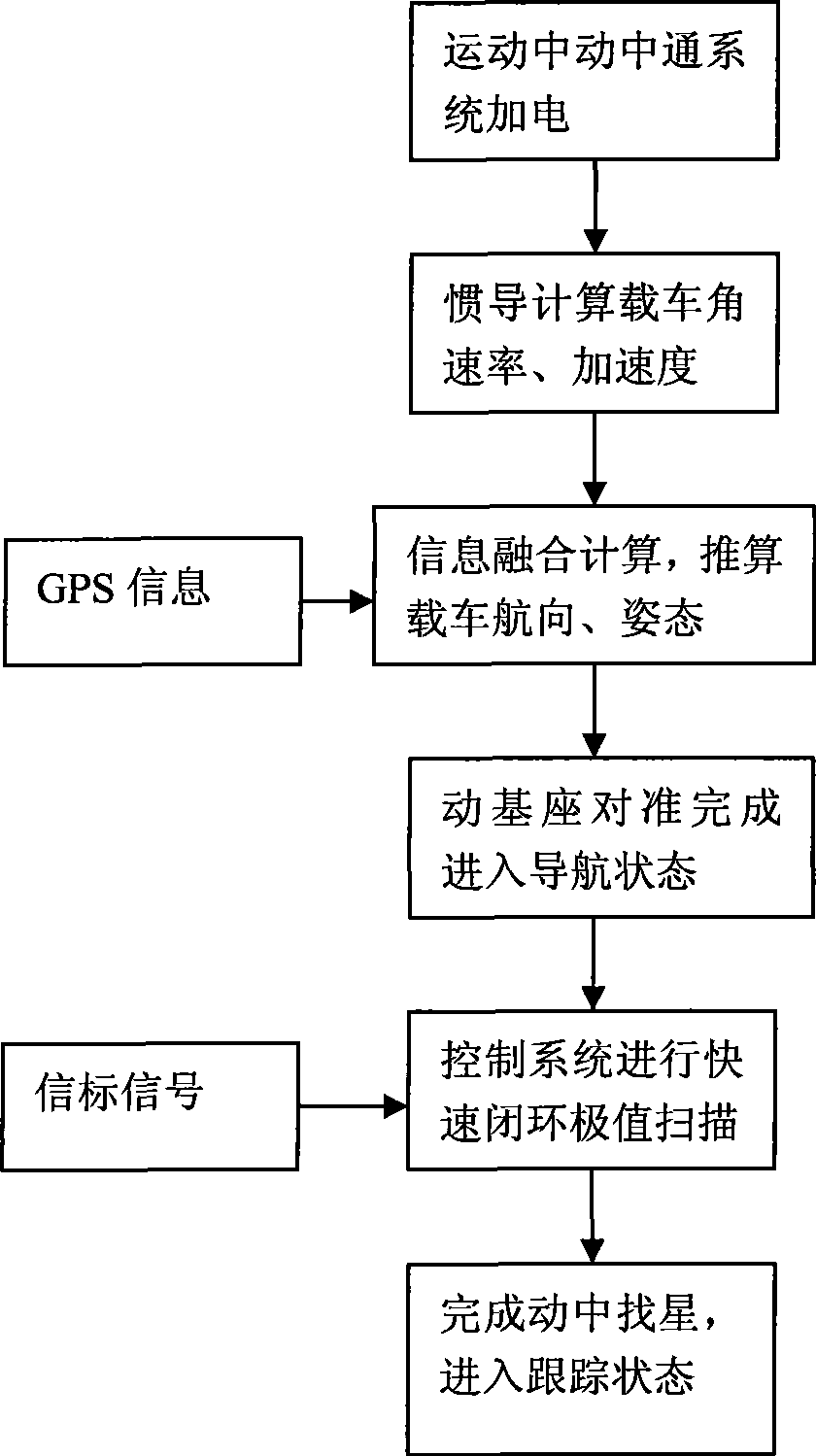
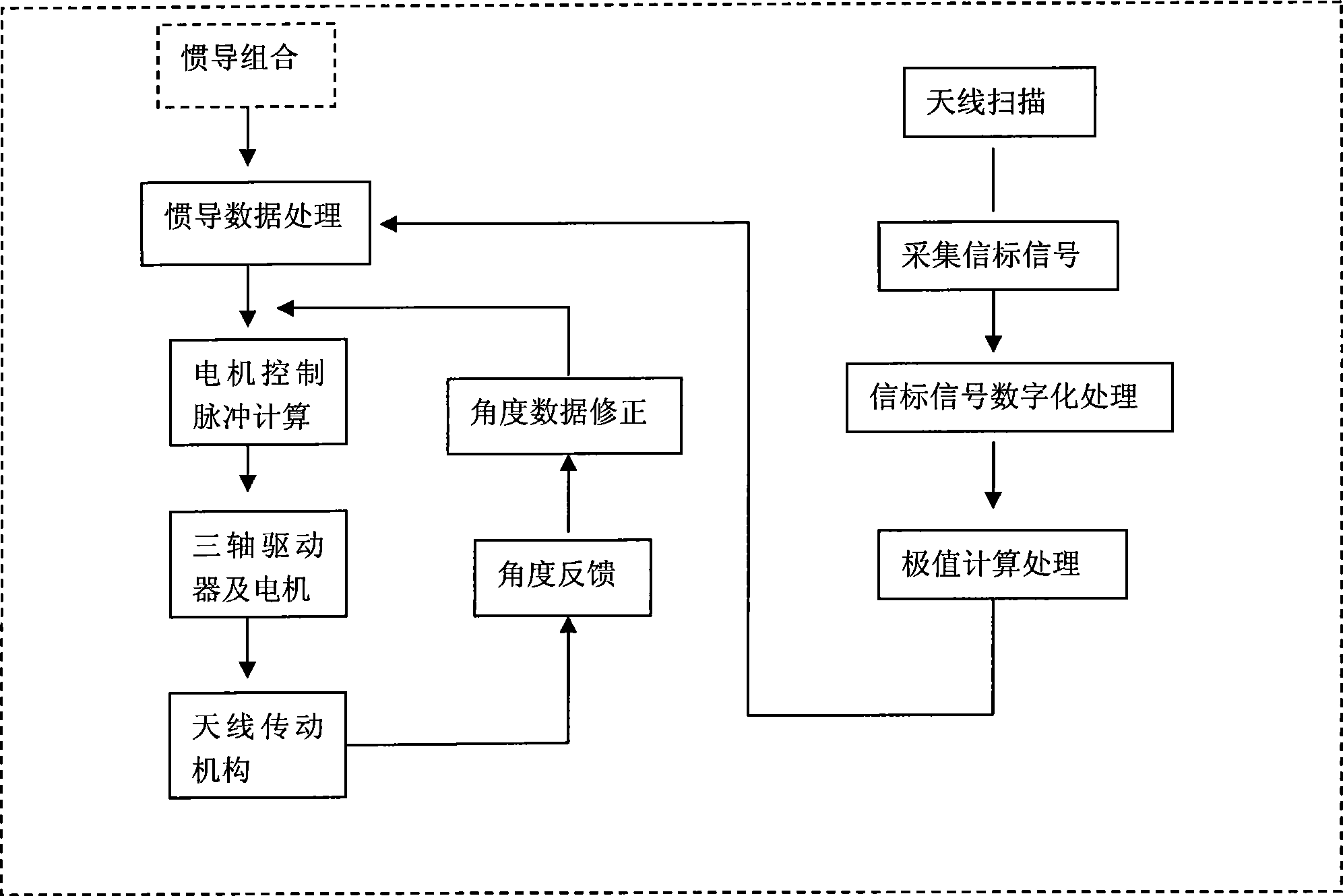
[0020] Such as figure 1 As shown, the fast-recovery-type communication-in-motion satellite alignment method involved in the present invention introduces high-precision GPS information, uses information such as GPS position and speed as reference quantities of the inertial navigation system, and performs information fusion with the inertial navigation system Calculation; on the basis of the original static alignment and dynamic tracking, the dynamic base alignment technology is added, that is, when the vehicle is in motion, the azimuth angle of the vehicle relative to the true north is calculated through comprehensive calculations of sensors such as gyroscopes and accelerometers and the attit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More