

Nonsingularity space five- freedom-degree parallel robot
A technology with degrees of freedom and singularity, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of unbalanced driving force, loss of rigidity of the mechanism, reduction of end positioning accuracy, etc., to achieve the effect of wide application, large working space and easy control.
Inactive Publication Date: 2010-11-24
ZHEJIANG UNIV
View PDF0 Cites 1 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
A parallel mechanism in a singular configuration will produce many undesirable characteristics, such as the instantaneous loss of stiffness of the mechanism, the reduction of the positioning accuracy of the end, and the inability of the driving force to balance the specific generalized force of the dynamic platform. Therefore, it is very important to study how to eliminate the singularity of the mechanism. The problem
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
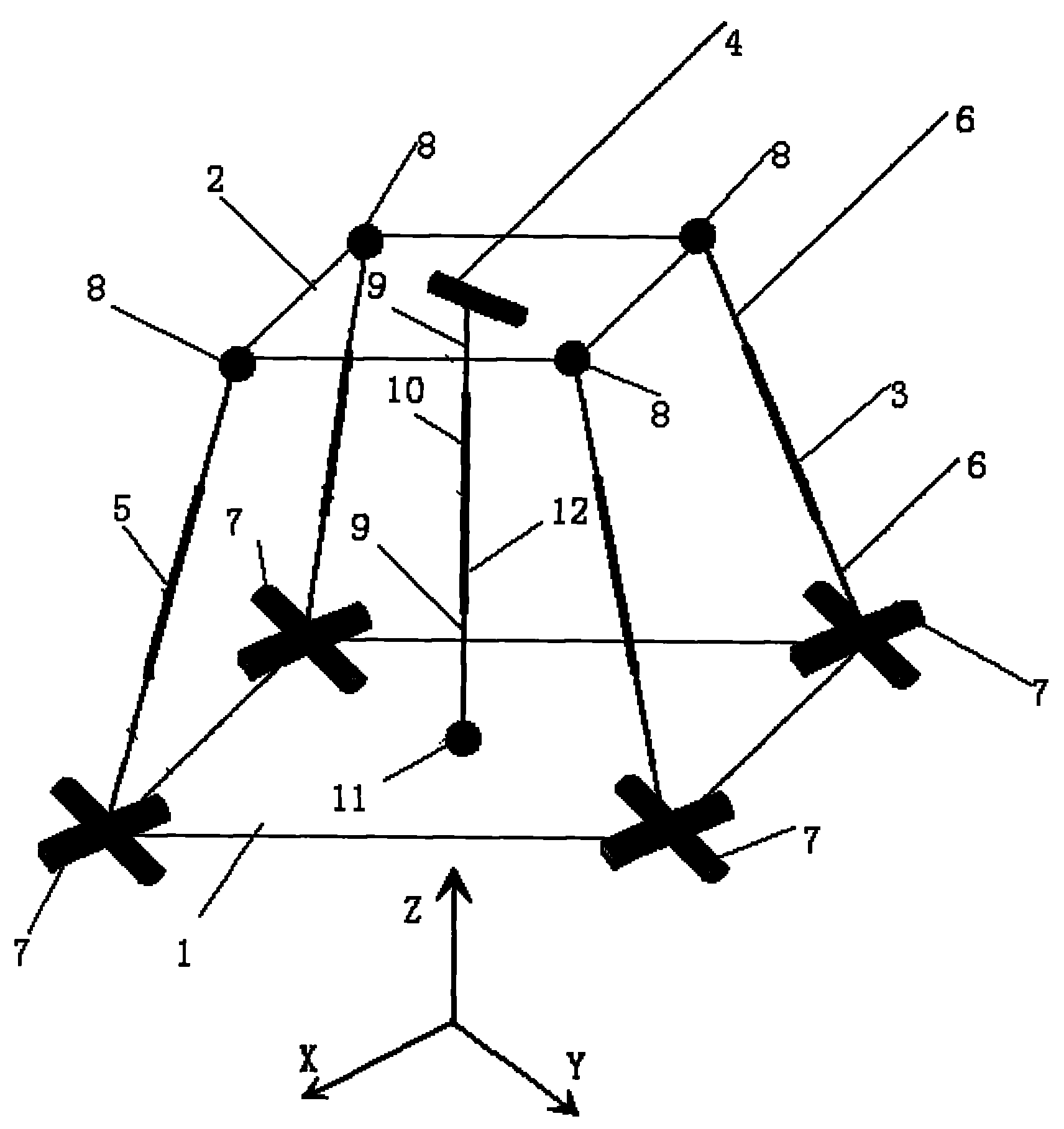
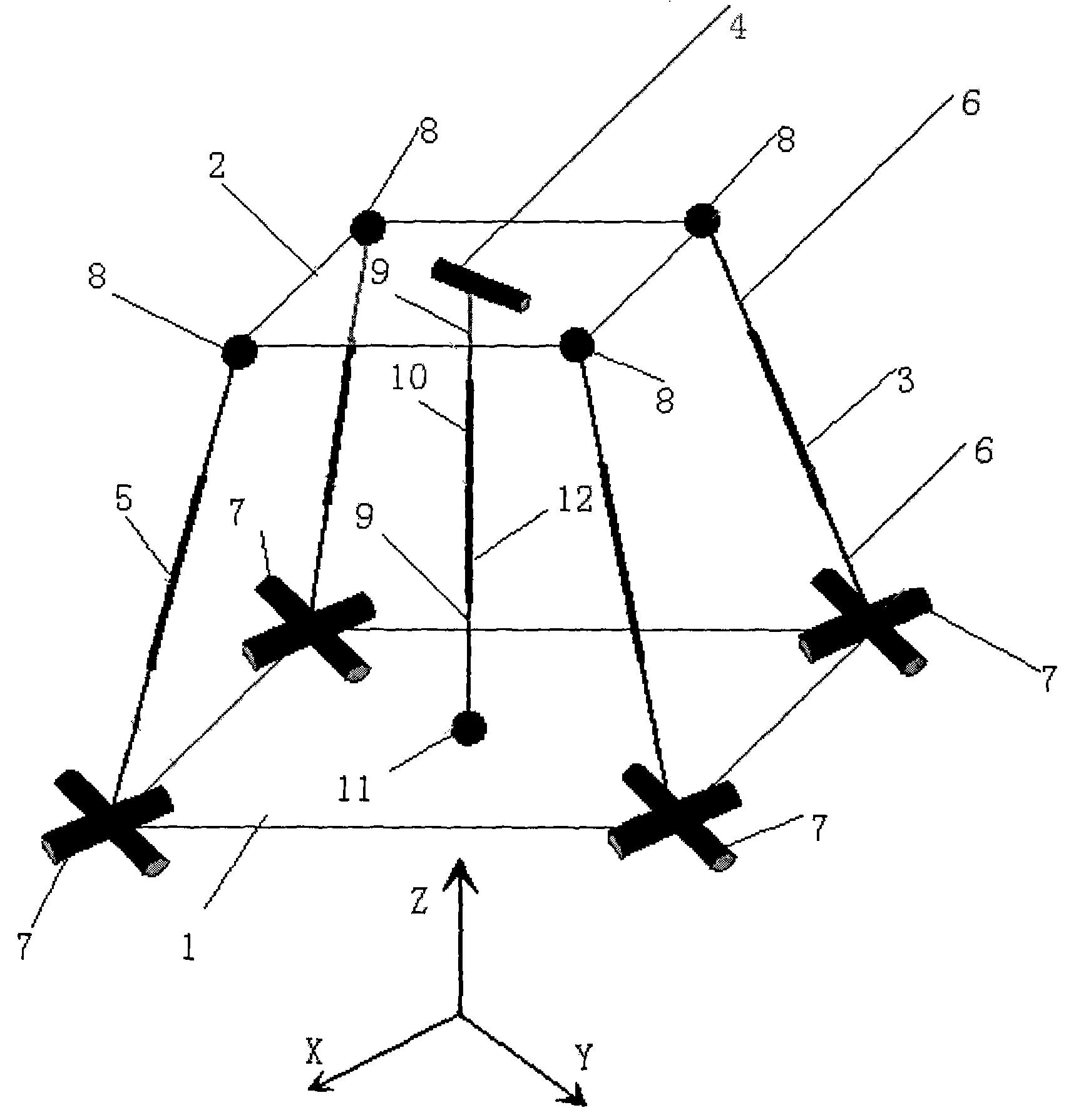
The invention discloses a nonsingularity space five- freedom-degree parallel robot, comprising a movable platform, a static platform and five branched-chains for connecting the movable platform and the static platform, wherein four branched-chains are unrestricted branched-chains with the same structure, one branched-chain is restricted branched-chain, each unrestricted branched-chain comprises aHooke's hinge, a first moving set with two slide bars and a first hinge ball which are connected in order, the Hooke's hinges and the first hinge balls of four branched-chains are respectively connected with corresponding angular points of the movable platform and the static platform, the restricted branched-chain comprises a rotary pair, a second moving set with two slide bars and a second hingeball which are connected in order, the rotary pair of the restricted branched-chain is connected with the center of the static platform, the second hinge ball of the restricted branched-chain is connected with the centre of the movable platform, the side length of the movable platform is different from that of the static platform. The invention has strong bearing capacity, good stress characteristics, no nonsingularity and good application in the fields of exact densor, micromotion operation table, virtual-shaft machine tool and the like.
Description
Parallel robot with five degrees of freedom in non-singularity space technical field The invention relates to a parallel robot structure, in particular to a five-degree-of-freedom parallel robot capable of rotating in two directions and moving in three directions without singularity. Background technique Parallel mechanism has many excellent characteristics, such as small error, high rigidity, large load capacity, etc., but it also has inherent shortcomings. Singularity is one of the inherent properties of parallel mechanism. For parallel mechanisms, singularity usually means that when the mechanism is in a certain configuration, the normal degrees of freedom of its moving platform will change instantaneously. A parallel mechanism in a singular configuration will produce many undesirable characteristics, such as the instantaneous loss of stiffness of the mechanism, the reduction of the positioning accuracy of the end, and the inability of the driving force to balance the s...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B25J11/00
Inventor李凌丰彭铁柱
OwnerZHEJIANG UNIV