

Power type walking method for biped robot
A bipedal robot, powered technology, applied in manipulators, manufacturing tools, etc., can solve problems such as reducing walking stability and gait disturbance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
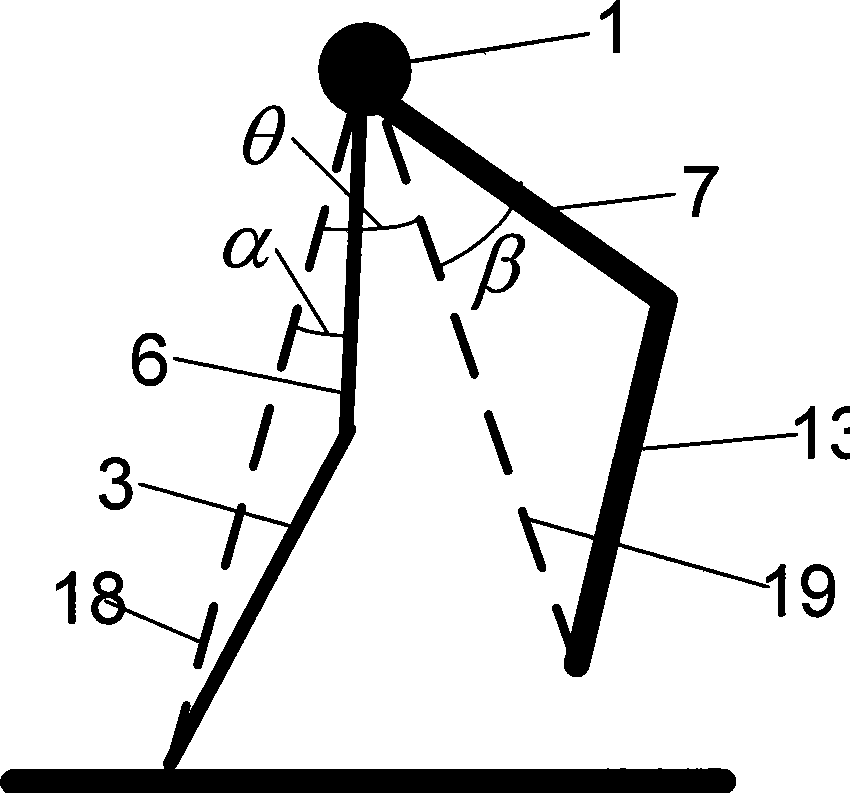
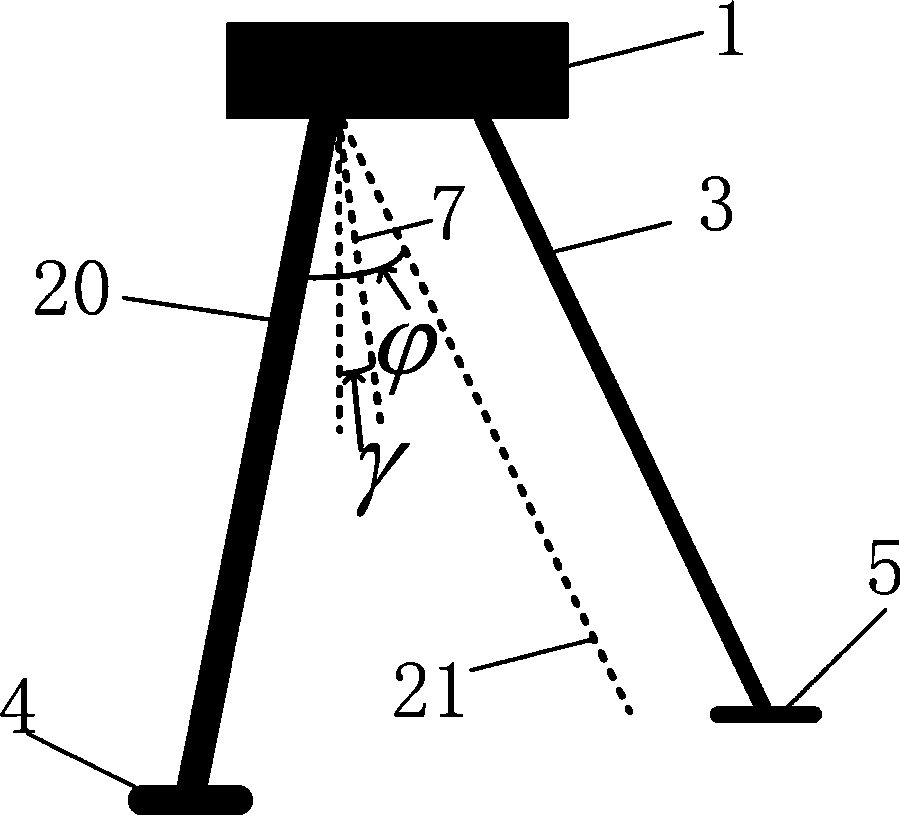
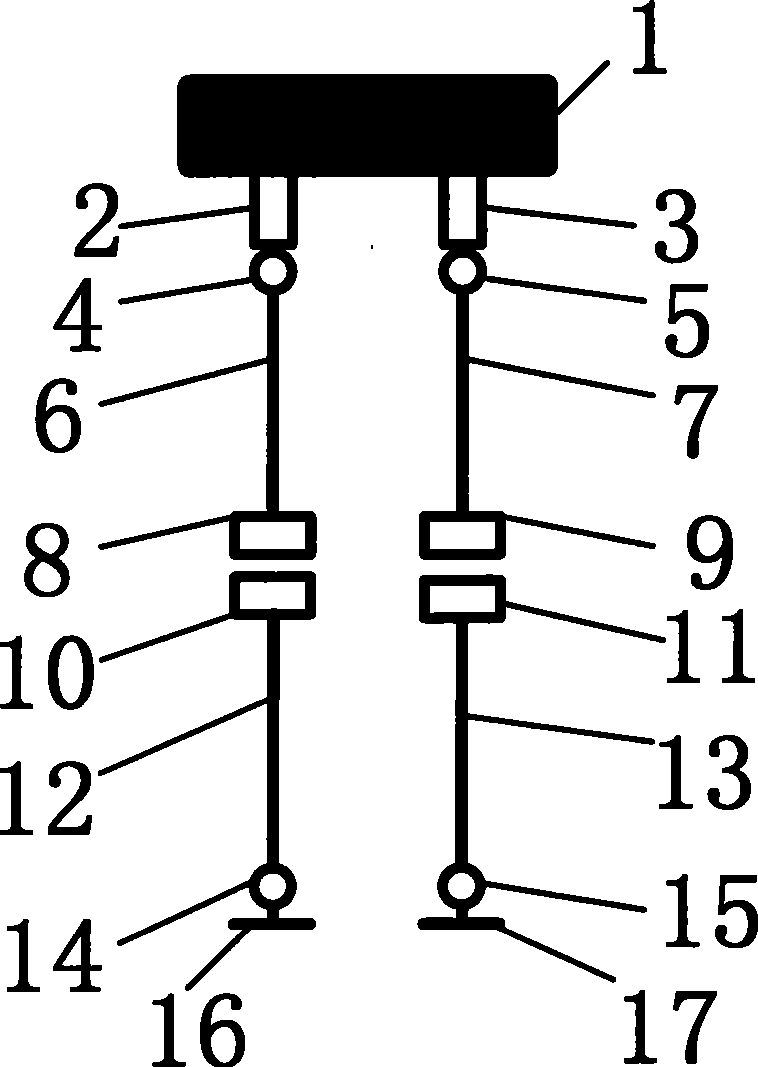
[0083] image 3 Shown is the structure and joint angle schematic diagram of the robot used in the present invention, and wherein 1 is trunk, is fixedly connected with the body of two left and right rotary motors 2,3, and the output shaft of two rotary motors is connected with two thighs 6,7 respectively. connected, the torso is fixedly connected with the bodies of the two hip joint side swing motors 4 and 5, the rotation output shafts of the two hip joint side swing motors are respectively connected with the two thighs 6 and 7, and the thigh 6 is connected with the thigh forward swing motor 8 The rotation output shaft is connected, the thigh 7 is connected with the rotation output shaft of the thigh forward swing motor 9, the thigh forward swing motor 8 is fixedly connected with the body of the calf swing forward motor 10, and the thigh swing forward motor 9 is fixed to the body of the calf swing forward motor 11. Connect, the rotation output shaft of shank forward swing motor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More