

Visual system for ball picking robot in stadium
A technology of robot vision and robot, which is applied in the field of vision system, can solve problems such as large amount of calculation, singleness, inability to complete recognition and planning, etc., and achieve the effect of fast processing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
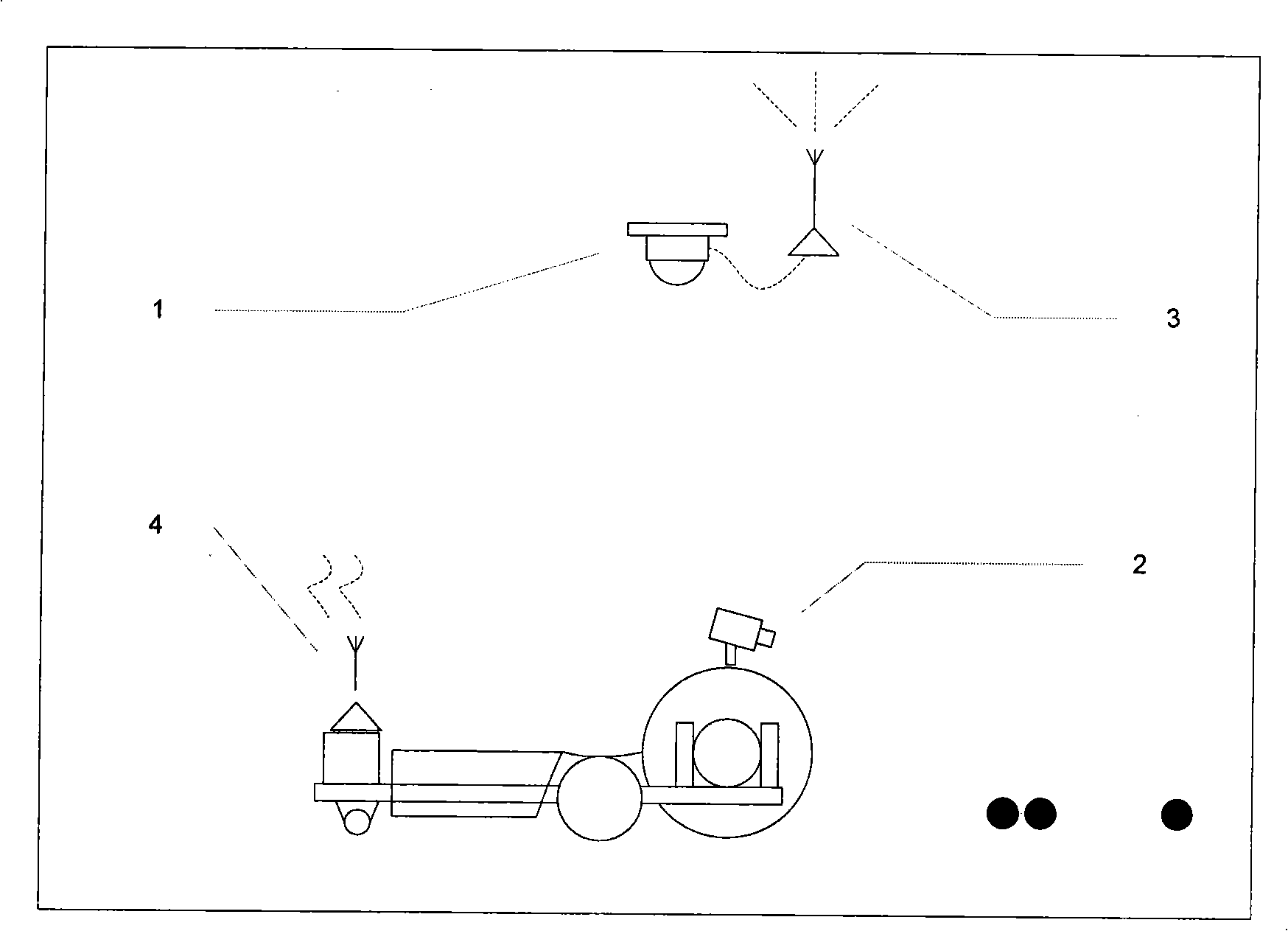
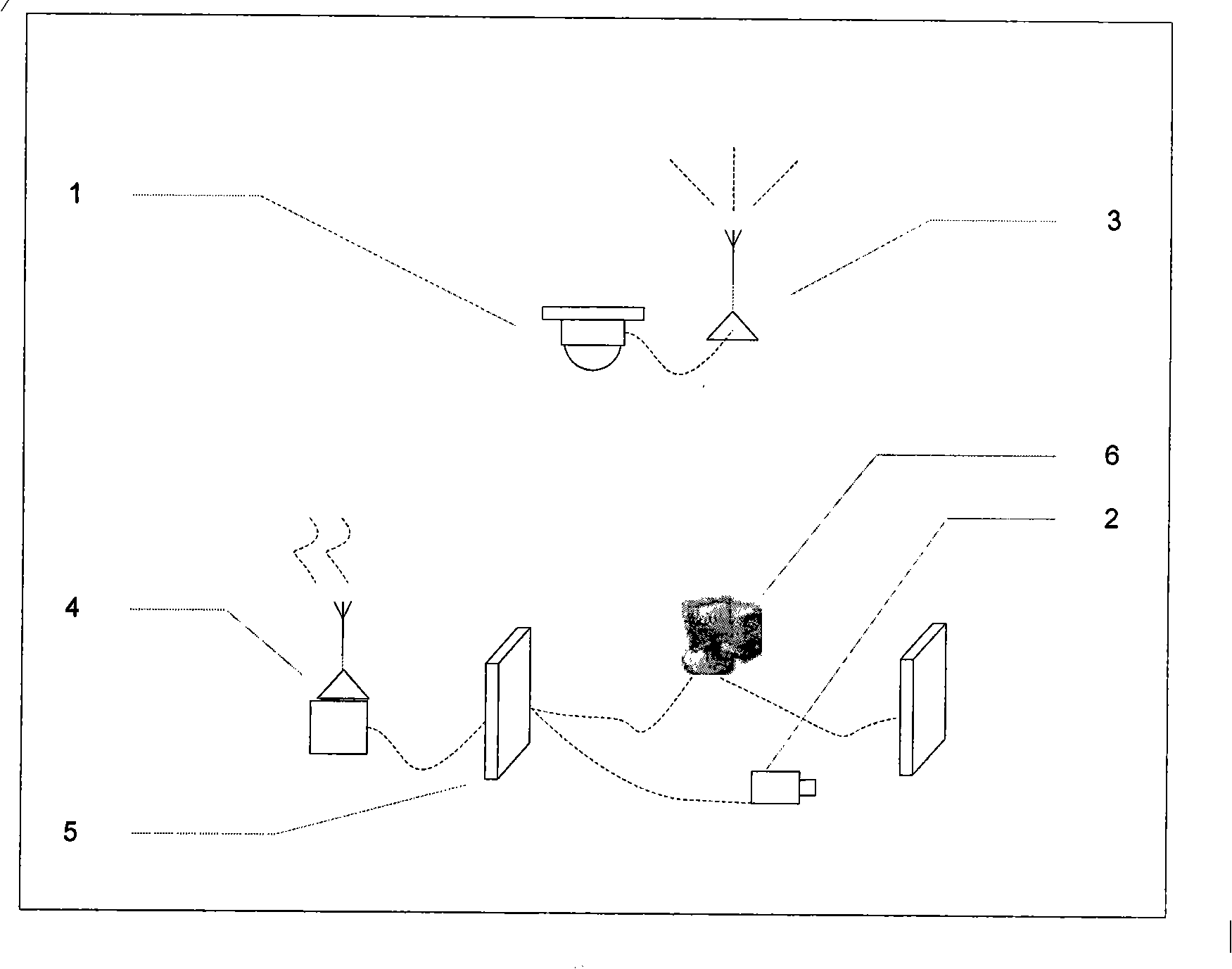
[0032] The vision system of the stadium ball picking robot of the present invention comprises a global camera (1), a robot carrier camera (2), wireless video transmission modules (3), (4), an image acquisition card (5) and an image processor (6). The global camera (1) uses the analog interface camera (1). The global camera (1) is installed above the field, and it is guaranteed to be able to fully photograph the sports field. The wireless video transmission modules (3), (4) adopt analog signal wireless video transmission modules (3), (4). The analog output end of the global camera (1) is connected with the transmitting end (3) of the wireless video transmission module through an AV video cable. The output end of the wireless video transmission receiver (4) is connected with the input end of the image acquisition card (5), the image acquisition card (5) is installed on the image processor (6), and the image processor (6) is installed inside the robot, Simultaneously, the image...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More