

Double flying robot-based method and double flying robot-based system for positioning active target
A technology of flying robot and positioning method, which is applied in the field of positioning and system of active targets based on dual flying robots, and can solve problems such as inconvenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] A preferred embodiment of the present invention is described as follows in conjunction with accompanying drawing:
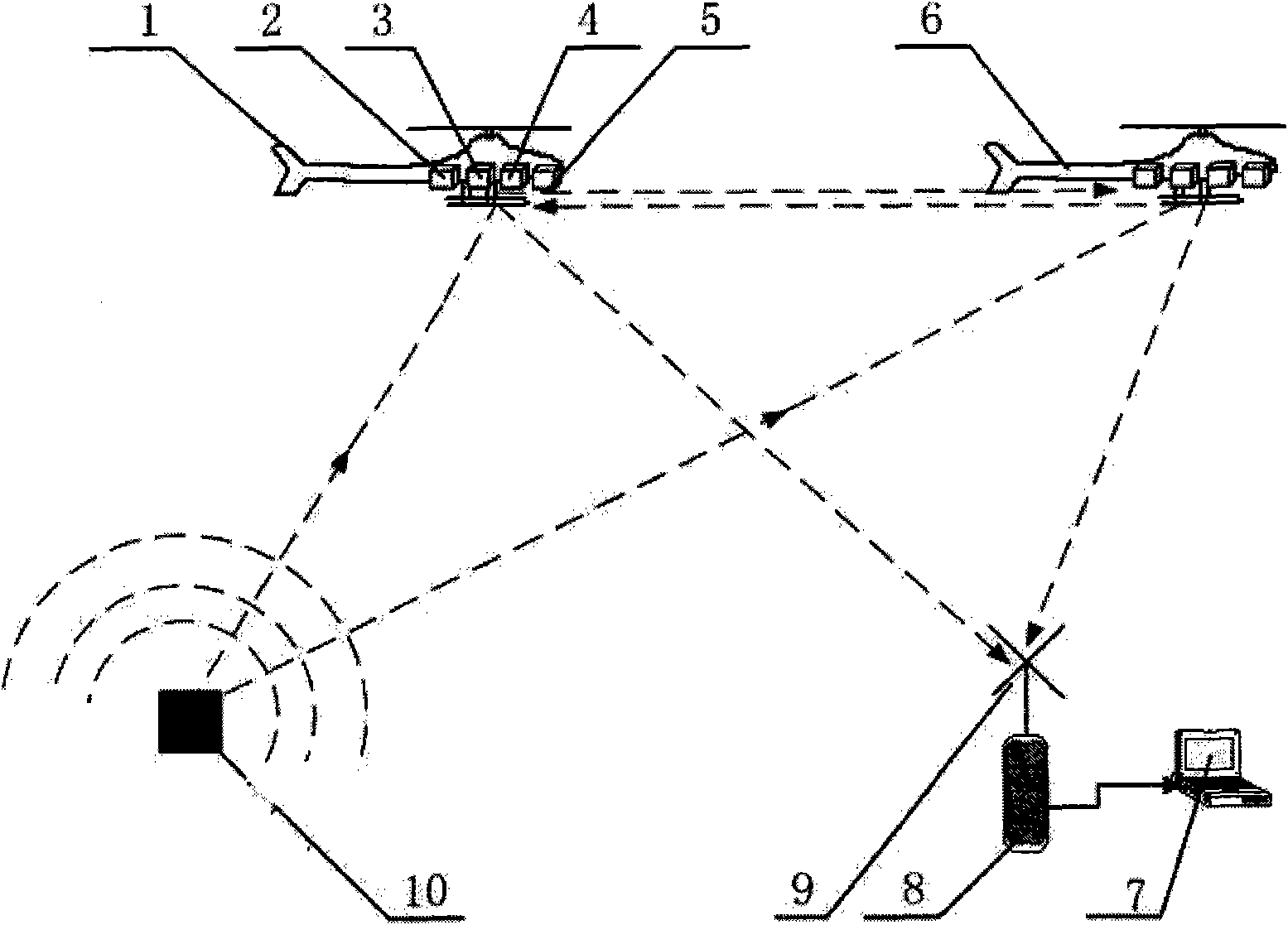
[0037] see figure 1 and figure 2 , this method is based on the positioning method of the radiation source target by the dual-flying robot. The positioning steps are as follows:
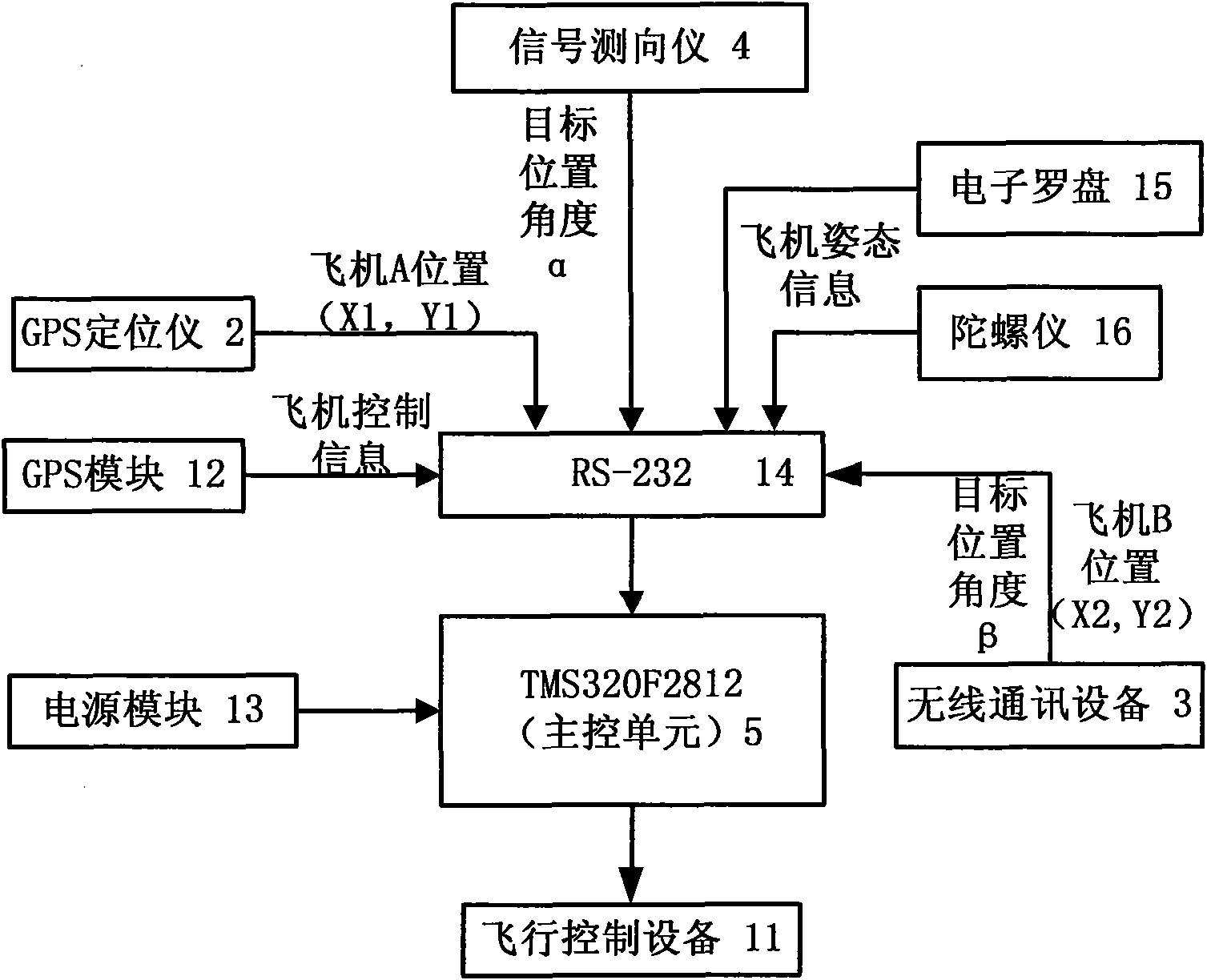
[0038] 1) Install two signal direction finders (4) on two unmanned aerial robots (1, 6) respectively, so that the two unmanned aerial robots (1, 6) can receive the target emission source during flight (10) Radio signals sent out;
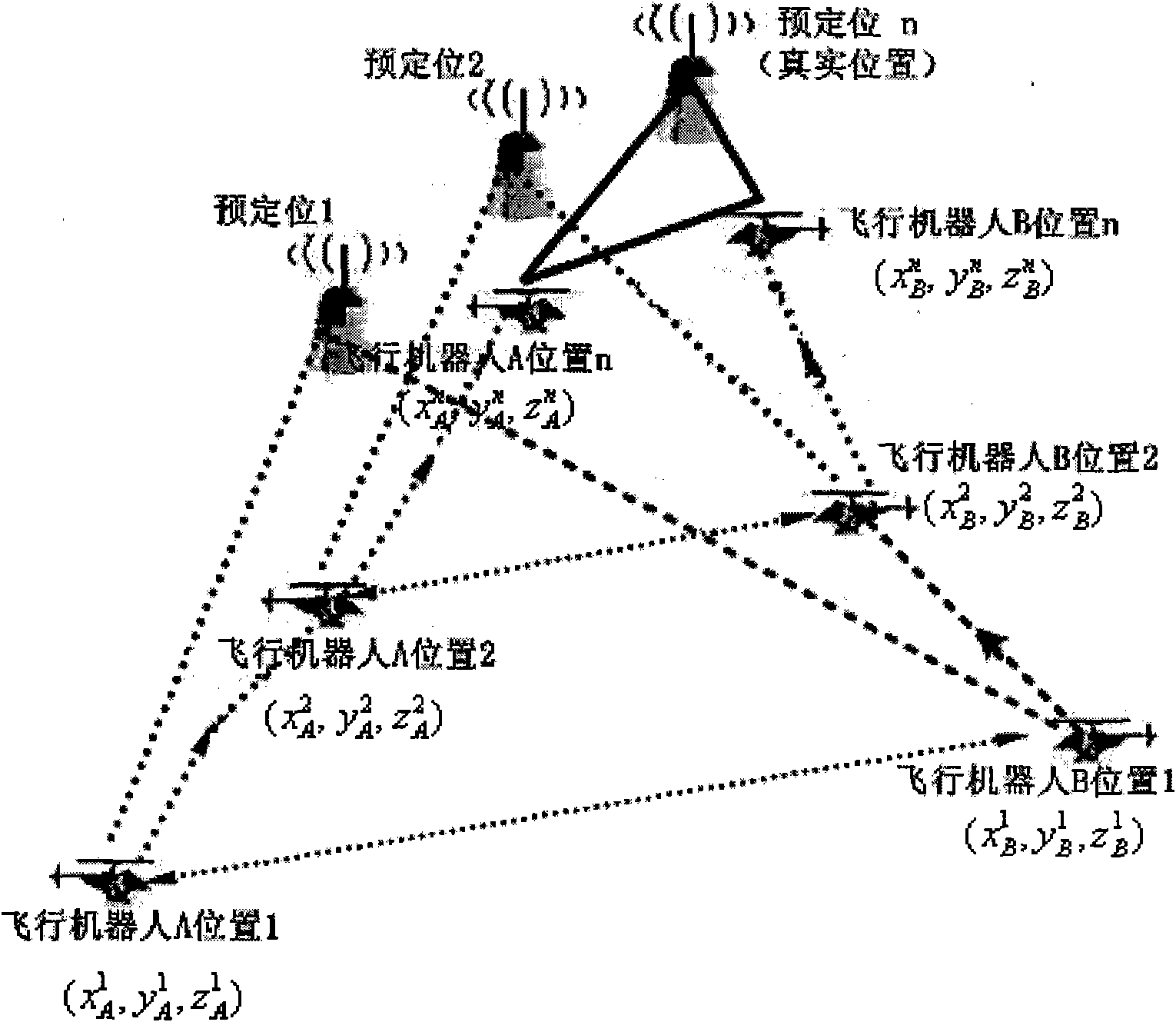
[0039] 2) As an independent flying unit, each unmanned aerial robot (1, 6) measures the direction of the signal after searching for the signal from the target emission source (10), and sends the direction finding result α or β through wireless communication The device (3) is sent to another flight unit;
[0040] 3) Receive the direction finding result β or α sent by another sub-flight unit through the wireless communication device (3), combine the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More