

Method and device for programming robot motion sequence
A technology of robot motion and programming method, which is applied to the field of programming method of robot motion sequence and its device, can solve the problems that the programming method is highly specialized and unsuitable for non-professional personnel, etc., and achieves the effect of intuitive and convenient operation and widening of popularization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
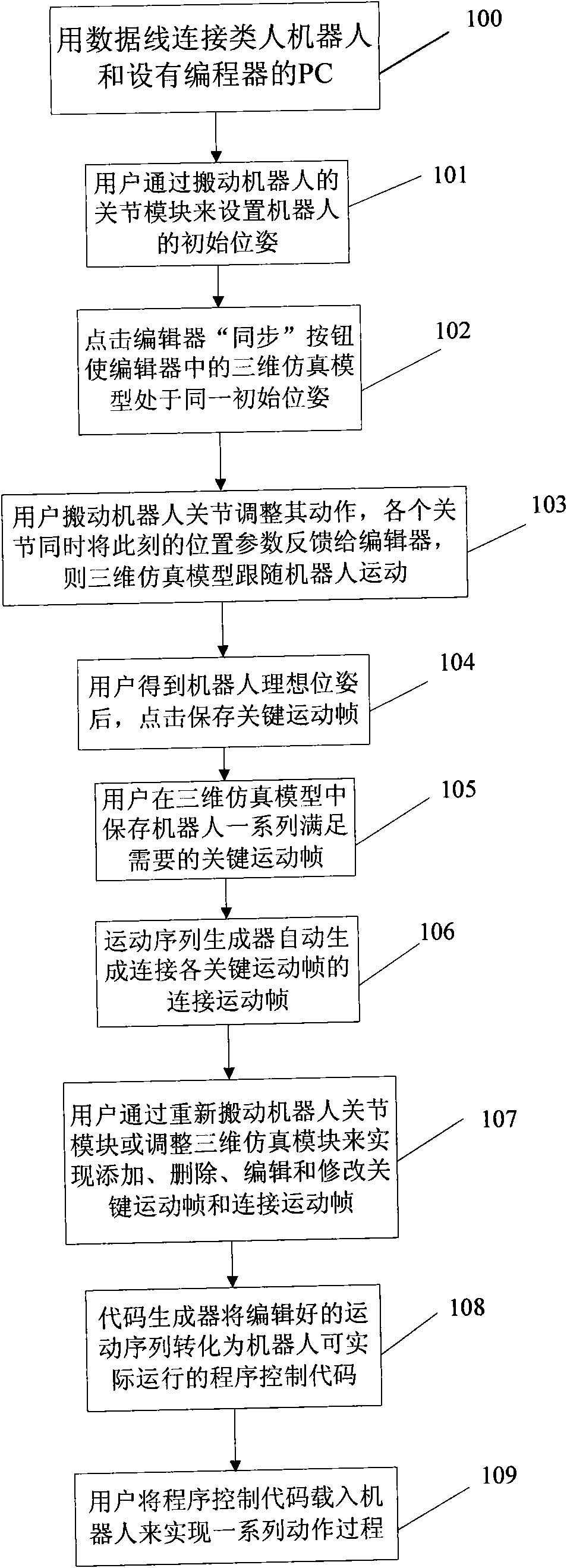
[0069] The preferred embodiments of the present invention are given below in conjunction with the accompanying drawings to describe the technical solution of the present invention in detail.
[0070] The programmer adopted in all embodiments is based on the software platform of PC and Windows operating system, and the three-dimensional simulation model adopts OPENGL to write.
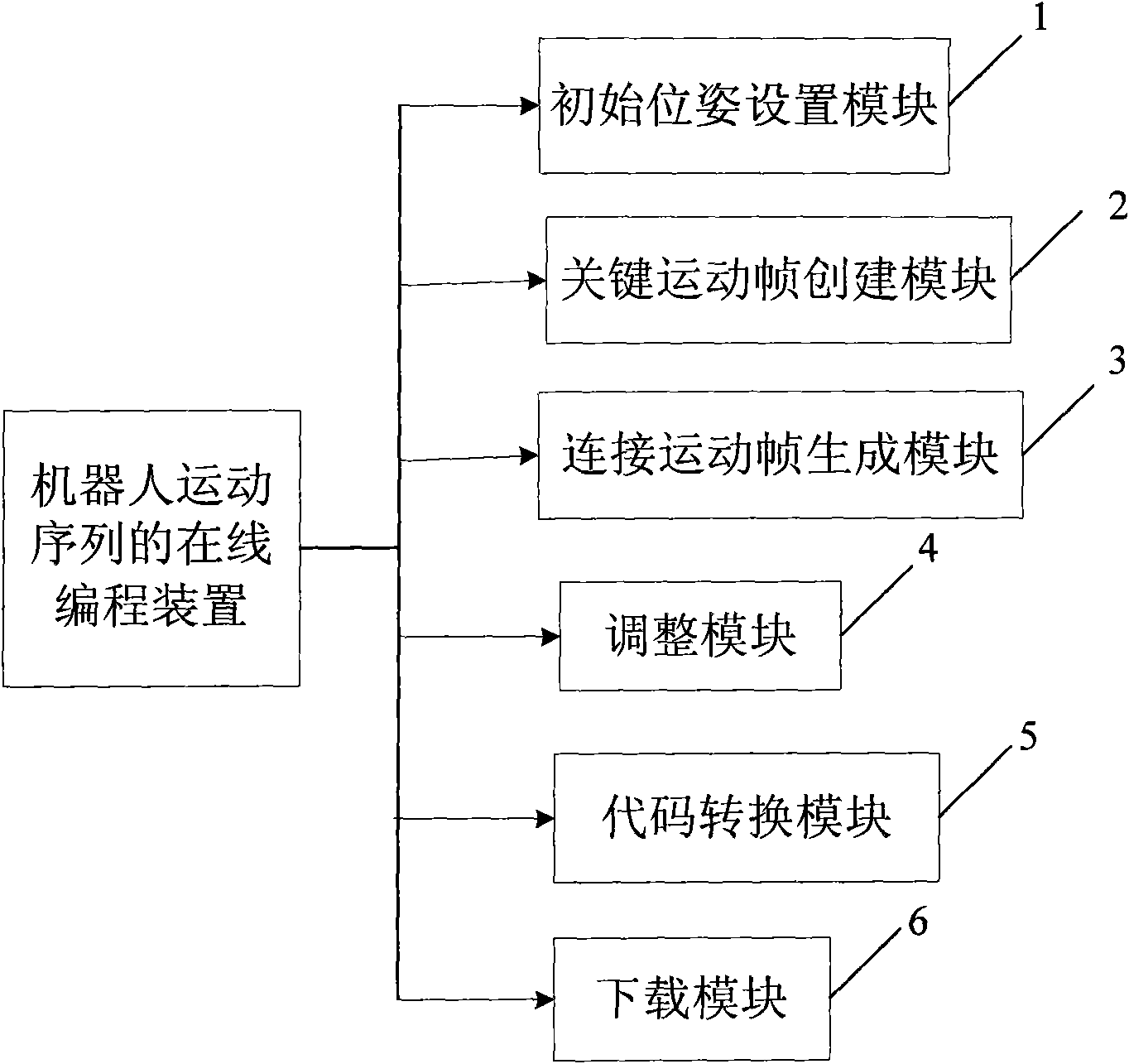
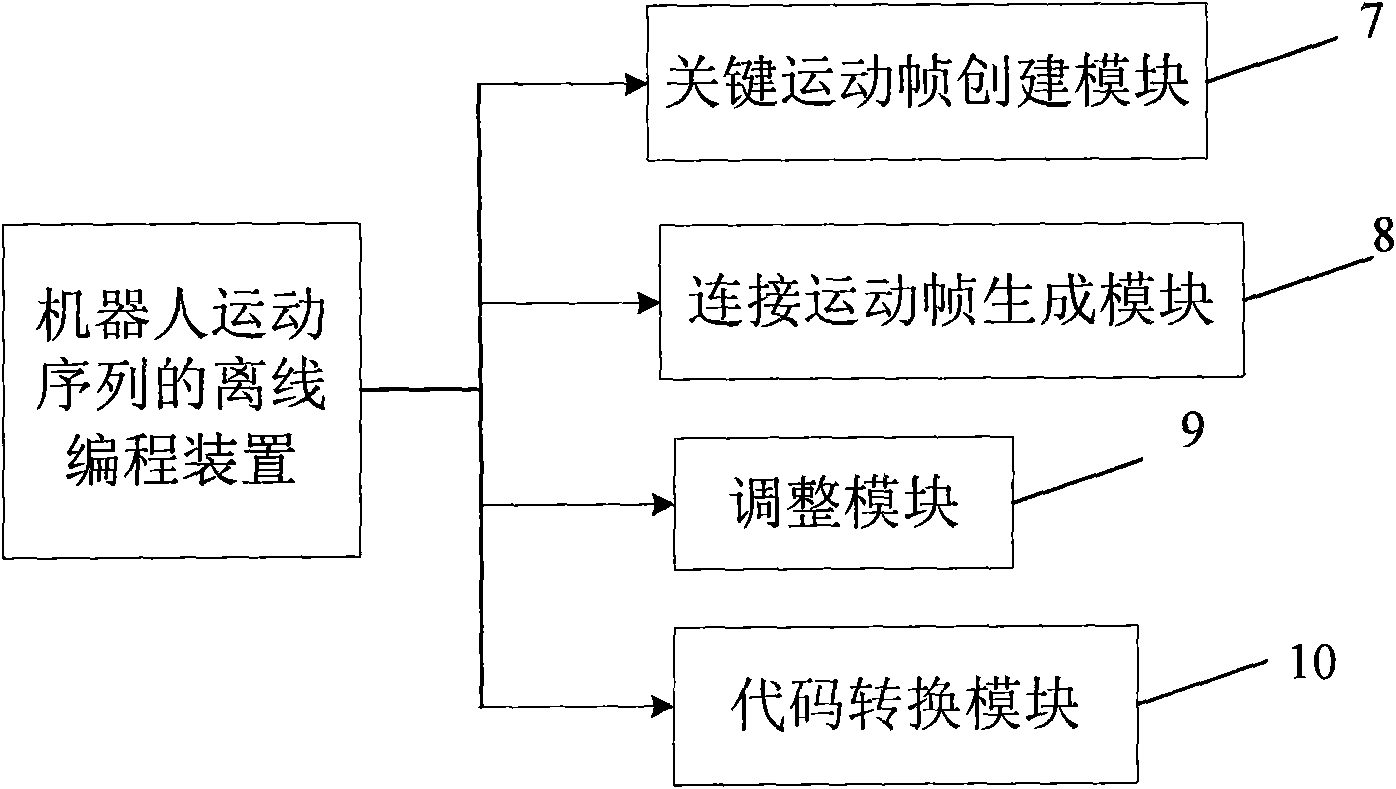
[0071] The multi-joint robot in the embodiment uses a humanoid robot as an example, and the humanoid robot is composed of a main controller and 18 joint modules. The main controller uses ARM9 microprocessor, and the motion joint module adopts AI-Servo (intelligent servo motor) sold by Guangmaoda Partner Robot Co., Ltd. The main controller is connected to the programmer on the PC through the USB cable. The controller communicates with each AI-Servo through the 485 bus. Each AI-Servo contains an ATMega8 microcontroller, sensors, motors and motor drive circuits. Each AI-Servo has a separate ID on the 485...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More