

Electric motor car differential steeling control method based on slip rate control
A control method and differential steering technology, which is applied in the directions of automatic steering control components, non-deflectable wheel steering, and control drive, and can solve problems such as long cycle time, high R&D cost, and unstable steering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0033] A kind of electric vehicle differential steering control method based on slip ratio control, the method comprises the following steps:
[0034] (1) According to the wheel speed sensor, the rear wheel speed of the electric vehicle, the actual output torque of the drive motor, and the lateral speed of the vehicle are measured;
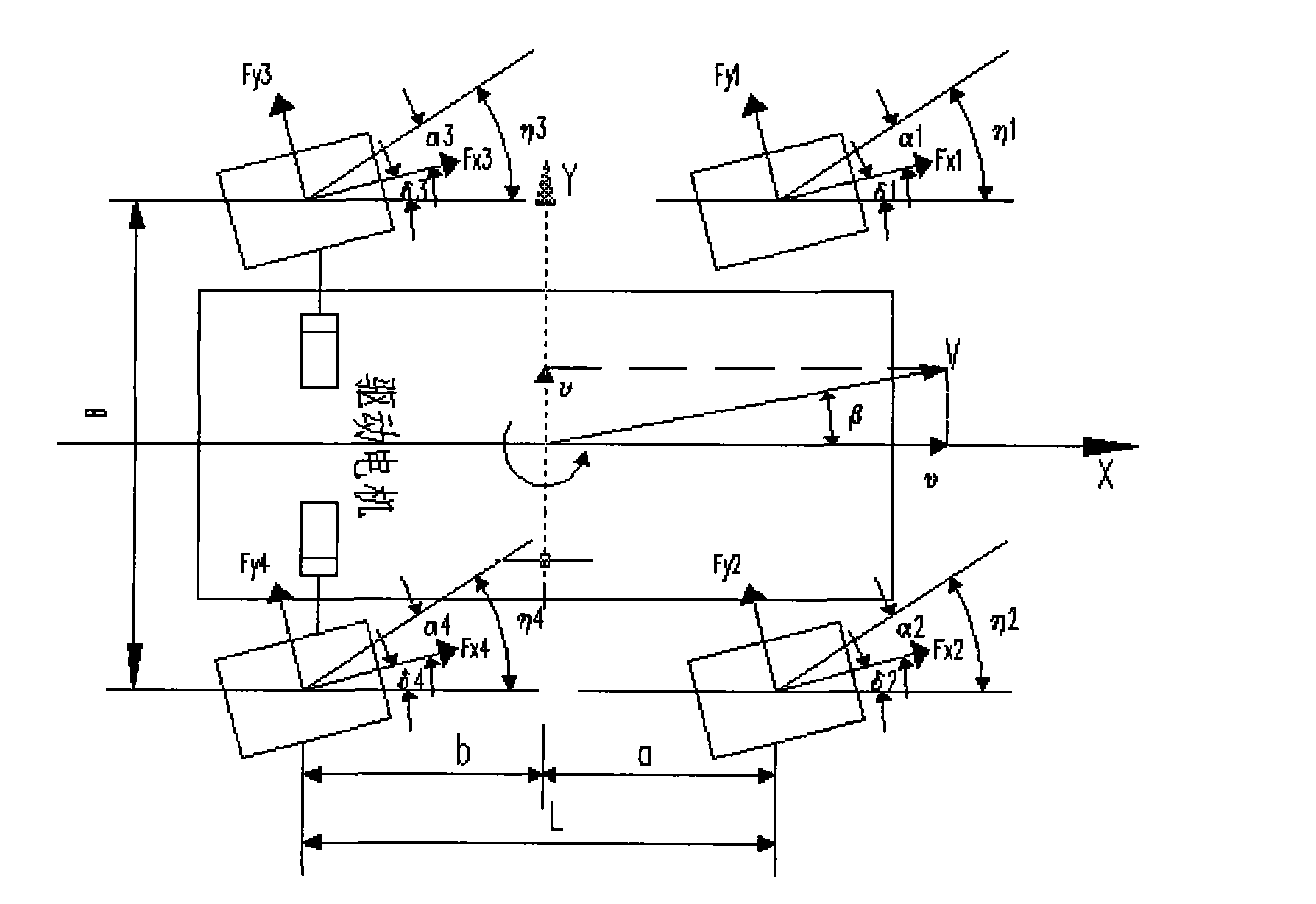
[0035] (2) Calculate the lateral velocity and yaw rate of the electric vehicle through the two-degree-of-freedom steering model, and then calculate the side slip angle of the four wheels, thereby calculating the rotational speed of the four wheels; use the following algorithm to realize the electronic control of the hub electric vehicle Differential steering control.
[0036]The electronic differential algorithm of the two-degree-of-freedom electric vehicle steering model includes: speed, side slip angle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More