Flexibility touch sensor for flexible finger tips of humanoid robot
A tactile sensor and flexibility technology, which is applied in the field of tactile sensors for dexterous fingertips of humanoid robots, can solve the problems that photoelectric tactile sensors cannot make overall compliant tactile sensors, lack overall flexibility, and poor impact resistance, etc., and achieve Simple structure, low structural simplification, good overall flexibility and impact resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
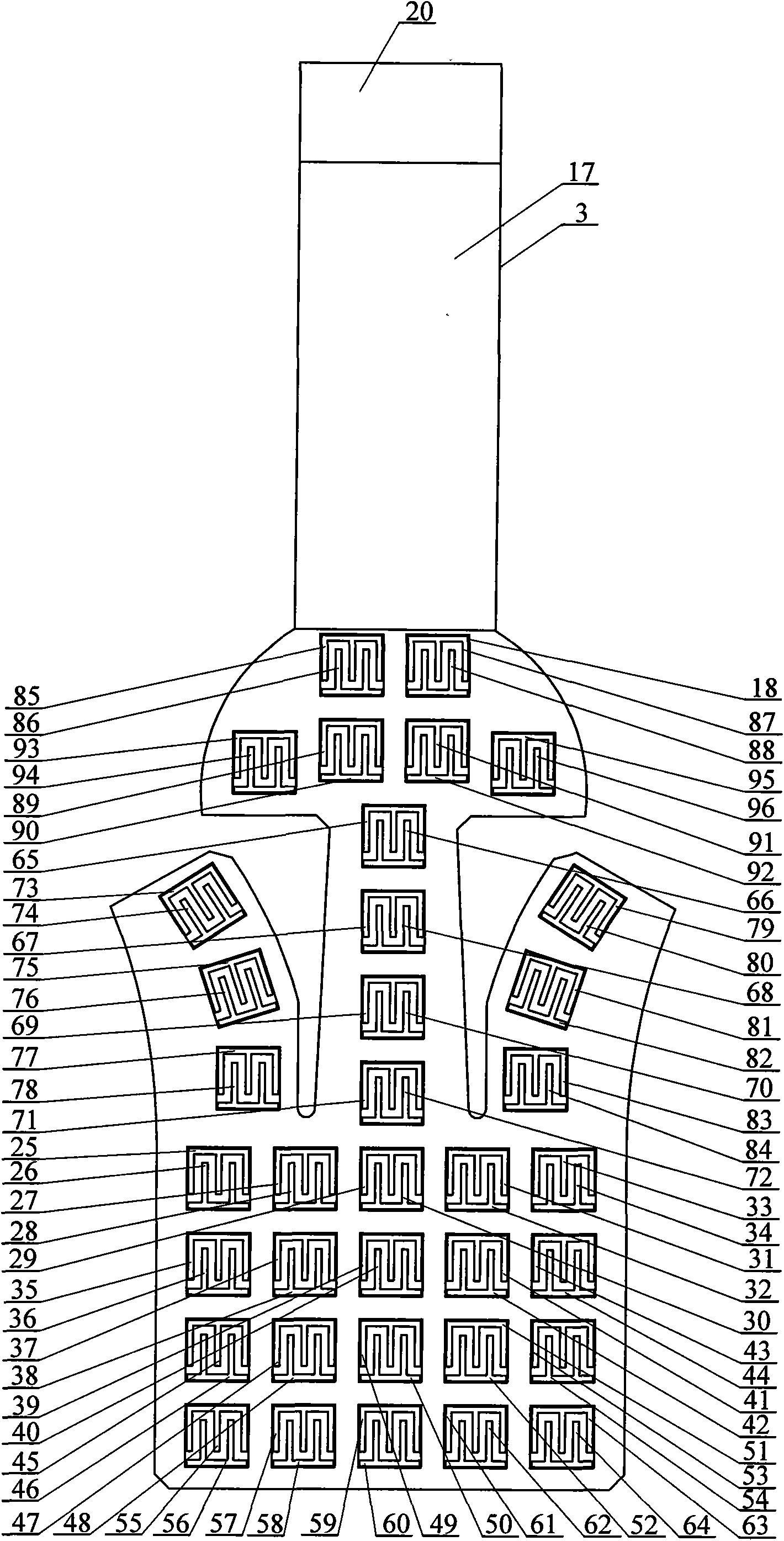
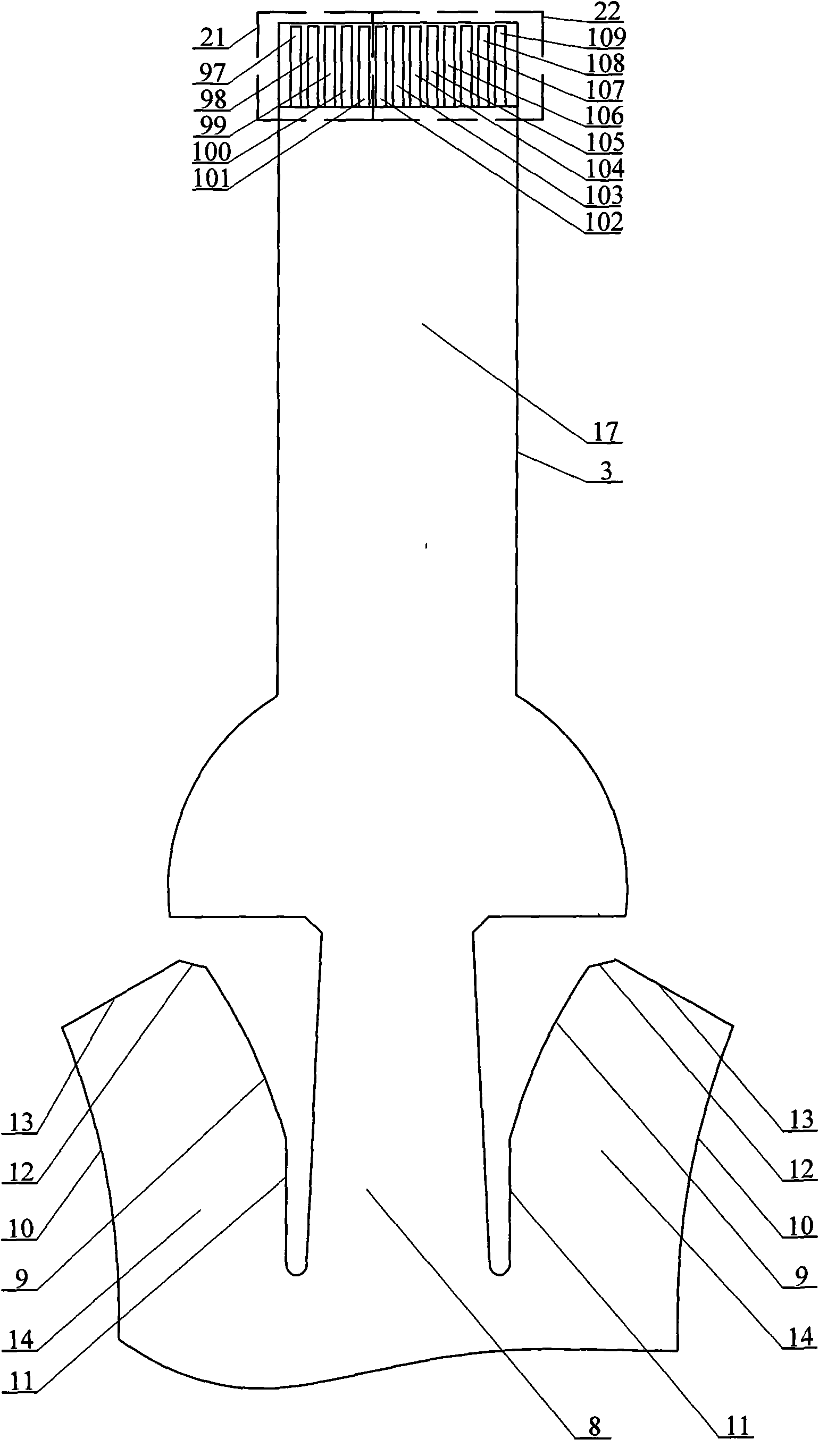
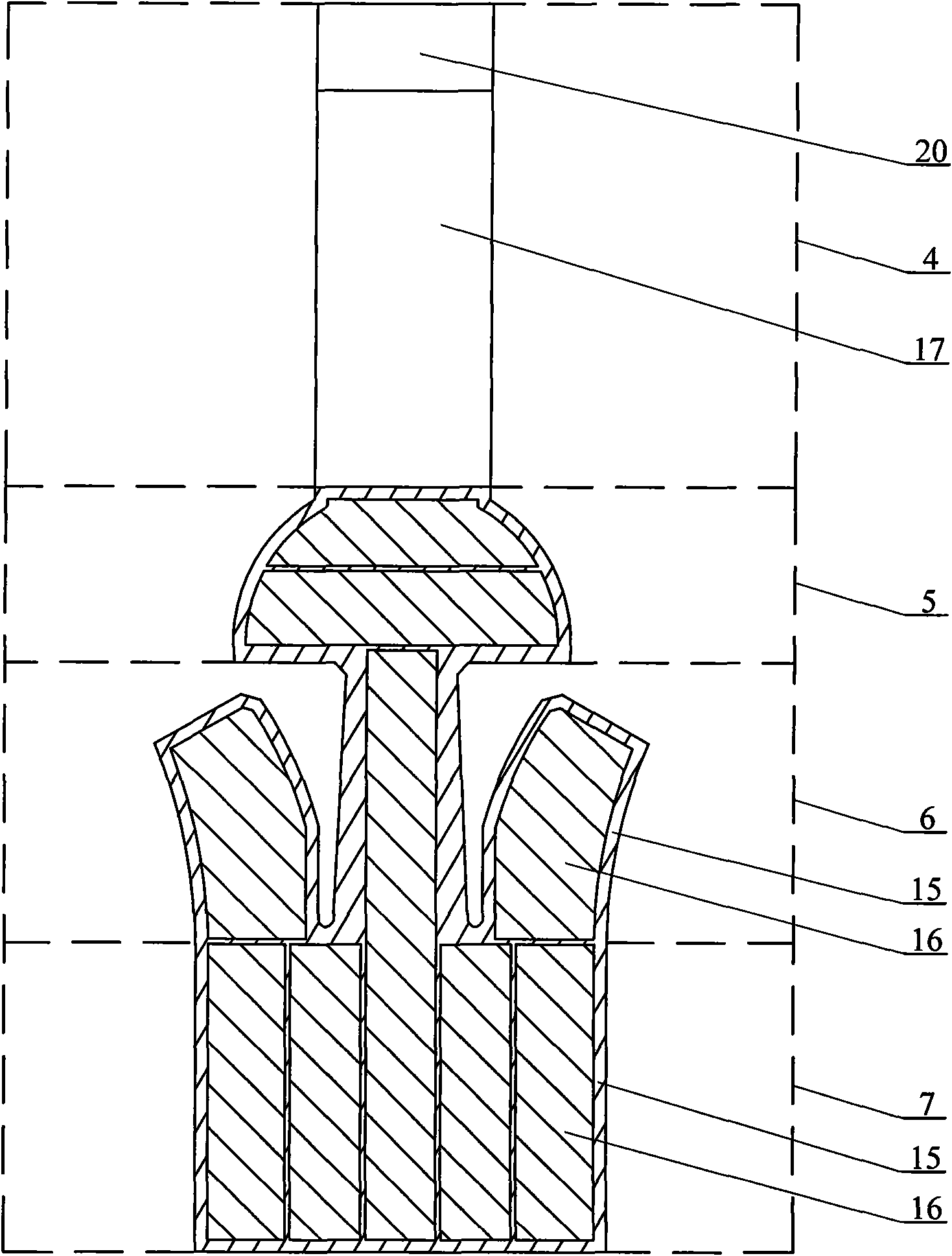
[0007] Specific implementation mode one: combine Figure 1 to Figure 7 Note that the touch sensor in this embodiment is composed of a flexible protective layer 1, a flexible piezoresistive sensitive layer 2 and a flexible substrate layer 3 from top to bottom, and the flexible piezoresistive sensitive layer 2 is composed of adhesive glue 15 Composed of a pressure-sensitive conductive rubber body 16, the flexible substrate layer 3 is composed of a substrate 17, a plurality of electrode pairs 18 (grid-shaped) and signal input and output joints, and the signal input and output joints are composed of a reinforcing layer 20 and ten Composed of three voltage input and output pins, the thirteen voltage input and output pins are composed of five voltage output pins 21 and eight voltage input pins 22, the flexible protective layer 1 is sensitive to the flexible piezoresistive Layer 2 is bonded, and the tactile sensor is divided into four areas from the top to the bottom. The four areas ...
specific Embodiment approach 2
[0008] Specific implementation mode two: combination Figure 1 to Figure 7Note that the number of electrode pairs 18 in this embodiment is thirty-six, and twenty electrode pairs 18 are etched on the upper surface of the flexible substrate layer 3 in the conical surface fitting area 7; Four electrode pairs 18 are etched on the upper surface of the flexible substrate layer 3 in the area 8; three electrode pairs 18 are etched on the upper surface of the flexible substrate layer 3 in each curved area 14; the cylindrical curved surface Six electrode pairs 18 are etched on the upper surface of the flexible substrate layer 3 in the fitting area 5; the twenty electrode pairs 18 in the conical surface fitting area 7 are arranged in four rows and five columns, and the number of rows is numbered Arranged in increasing order from the top to the bottom of the conic surface fitting area 7, which are the first row, the second row, the third row and the fourth row; Arranged in increasing ord...
specific Embodiment approach 3
[0009] Specific implementation mode three: combination Figure 5 Note that the material of the flexible protective layer 1 in this embodiment is insulating silicone rubber film or room temperature vulcanized insulating silicone rubber, which can not only protect the sensitive layer, but also increase the friction coefficient of the surface. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More