

Method of judging accelerator instead of brake and method of automatic brake
A technology of automatic braking and accidental stepping on the accelerator, which is applied to vehicle components, transportation and packaging, and the layout of power plant control mechanisms to achieve the effects of avoiding car accidents, responding quickly, and avoiding accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
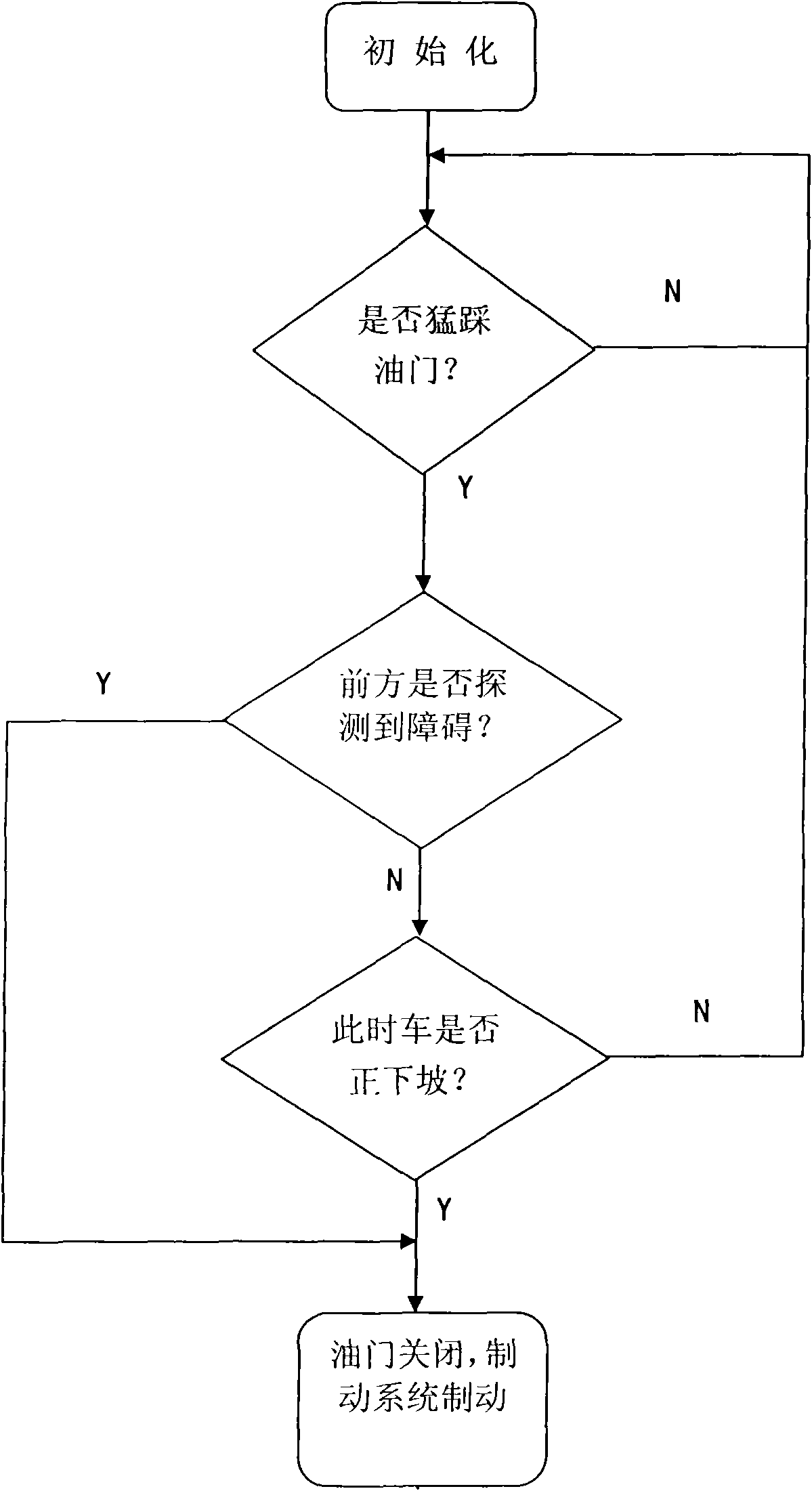
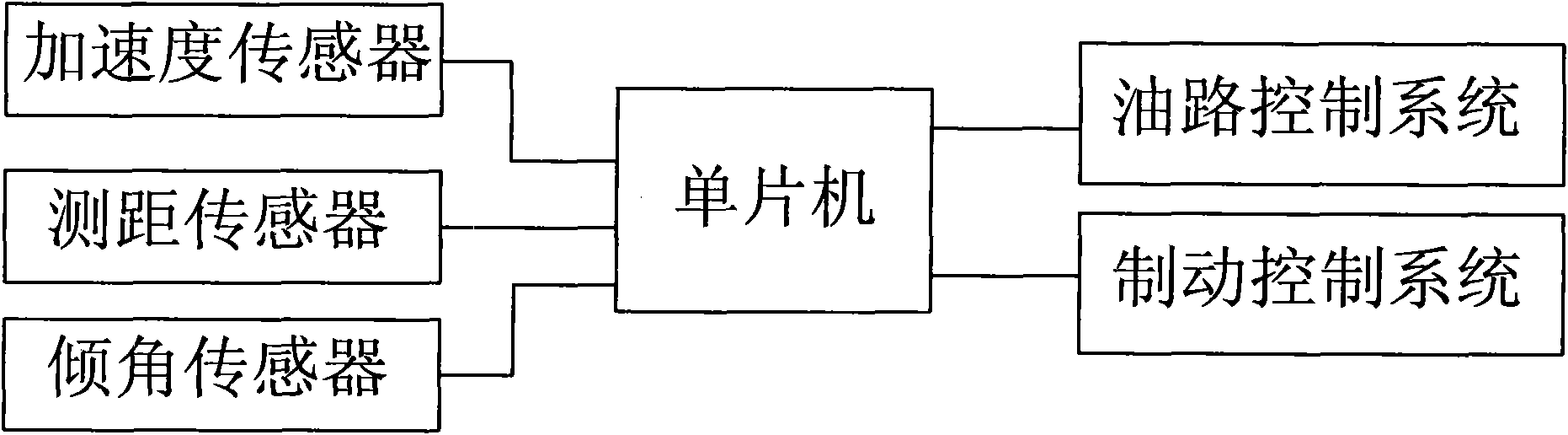
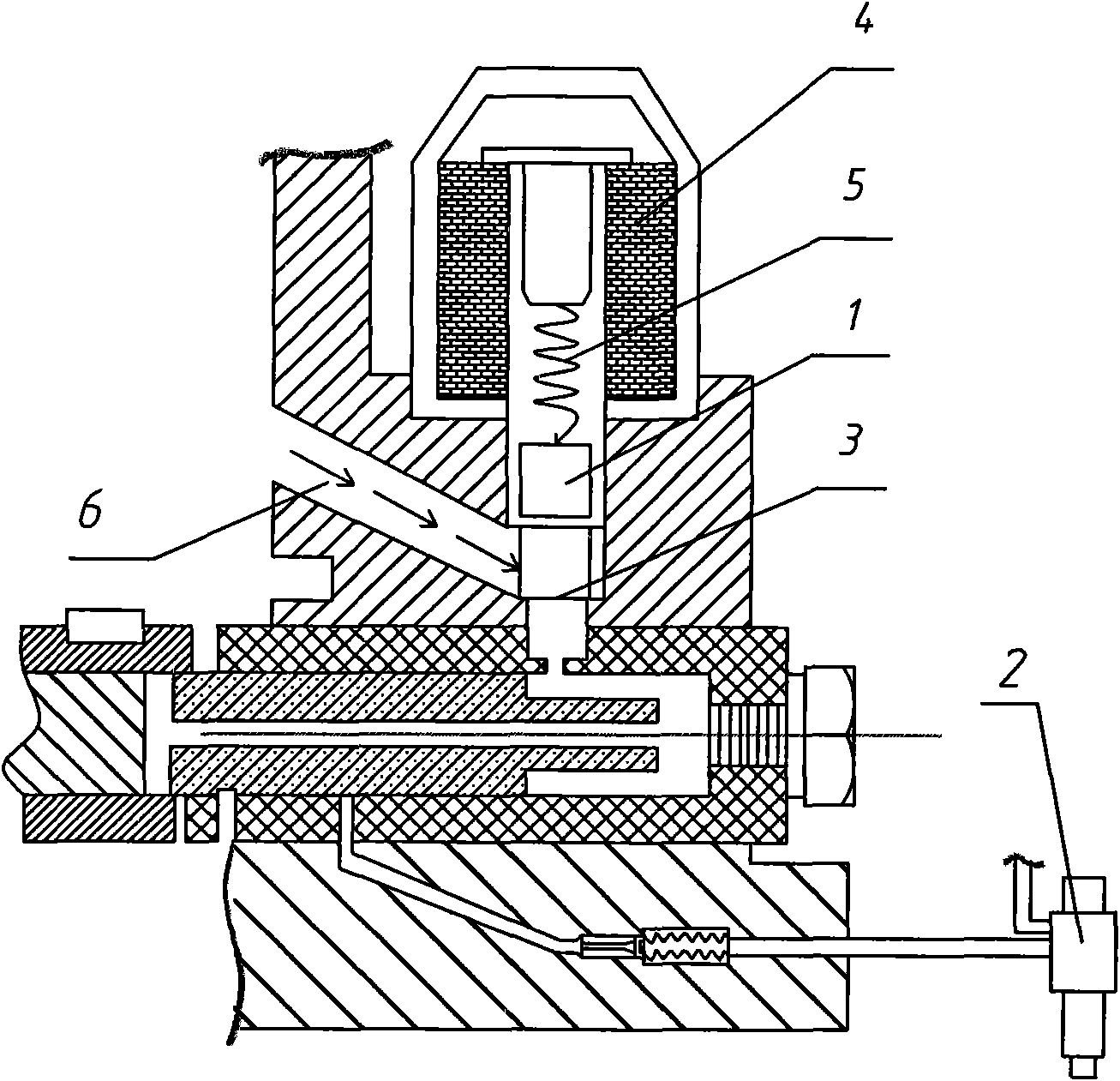
[0021] A method for judging and automatically braking the brakes by mistakenly stepping on the accelerator, the hardware part of the method is as follows figure 2 As shown, it is realized by a single-chip microcomputer with a preset program, a set of misoperation detection system connected to it, a set of oil circuit control system and a set of brake control system; wherein the misoperation detection system includes setting on the throttle The acceleration sensor of the table below the pedal, the ranging sensor arranged at the front end of the car, and the inclination sensor arranged at the car body; the oil circuit control system includes an oil cut-off solenoid valve, such as image 3 As shown, the piston 1 of the fuel cut-off solenoid valve is matched with the oil inlet hole 3 of the automobile fuel injector 2, and the electromagn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More