

Pneumatic ball kicking system of football robot
A football robot and kicking technology, applied in the direction of automatic toys, entertainment, toys, etc., can solve the problems of installation difficulties, robot circuit interference, incompatibility, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation methods and processes are provided, but the protection scope of the present invention is not limited to the following implementations example.
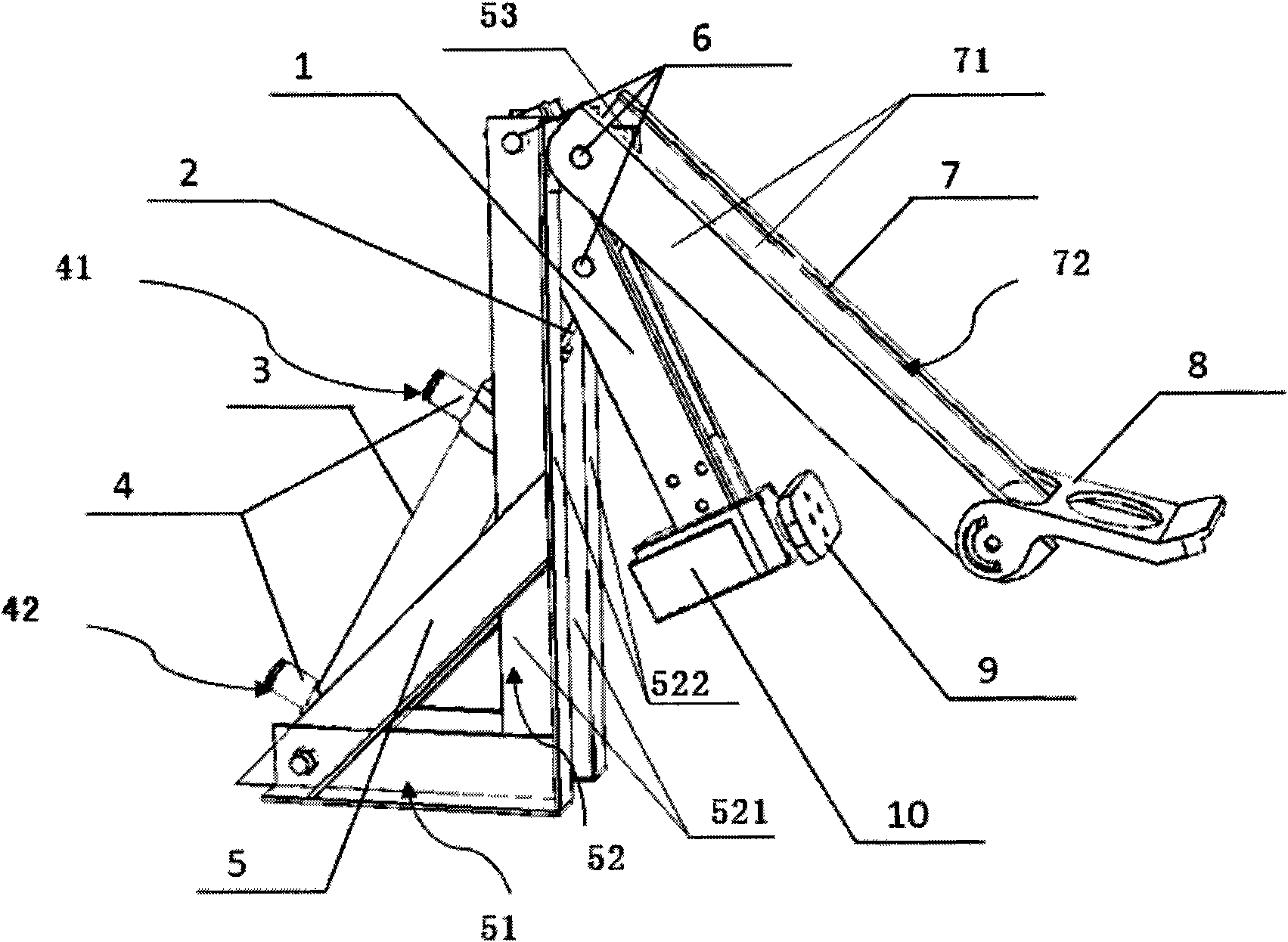
[0021] Such as figure 1 As shown, the present embodiment comprises: flat push ball kick 1, cylinder 3, frame 5, pick ball kick 7, flat push kick 1, pick ball kick 7 are movably connected with frame 5 tops respectively, cylinder 3 One end is connected with flat pushing kick 1, and the other end is connected with frame 5.
[0022] The frame 5 includes: a base 51, a support frame 52 positioned on the base 51, and an auxiliary frame 53. The support frame 52 is composed of two plane side plates 521 arranged parallel to each other. The kicker 1 passes through or is accommodated in the cavi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More