

Five-freedom dual-driving parallel mechanism
A degree of freedom and dual technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low flexibility in the working space, complex mechanism structure, and application restrictions, and achieve simple structure, good application prospects, and easy control Effect
Inactive Publication Date: 2011-01-05
YANSHAN UNIV
View PDF1 Cites 10 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The traditional robot system using a single drive pair has been unable to meet the above requirements, and the macro / micro dual drive robot system has the characteristics of large working space, high flexibility, low inertia and high precision, making it a research hotspot
However, most of the existing macro / micro dual-drive robot systems are directly connected in series with two single-drive robot systems, and the complex structure of this type of mechanism limits its application.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
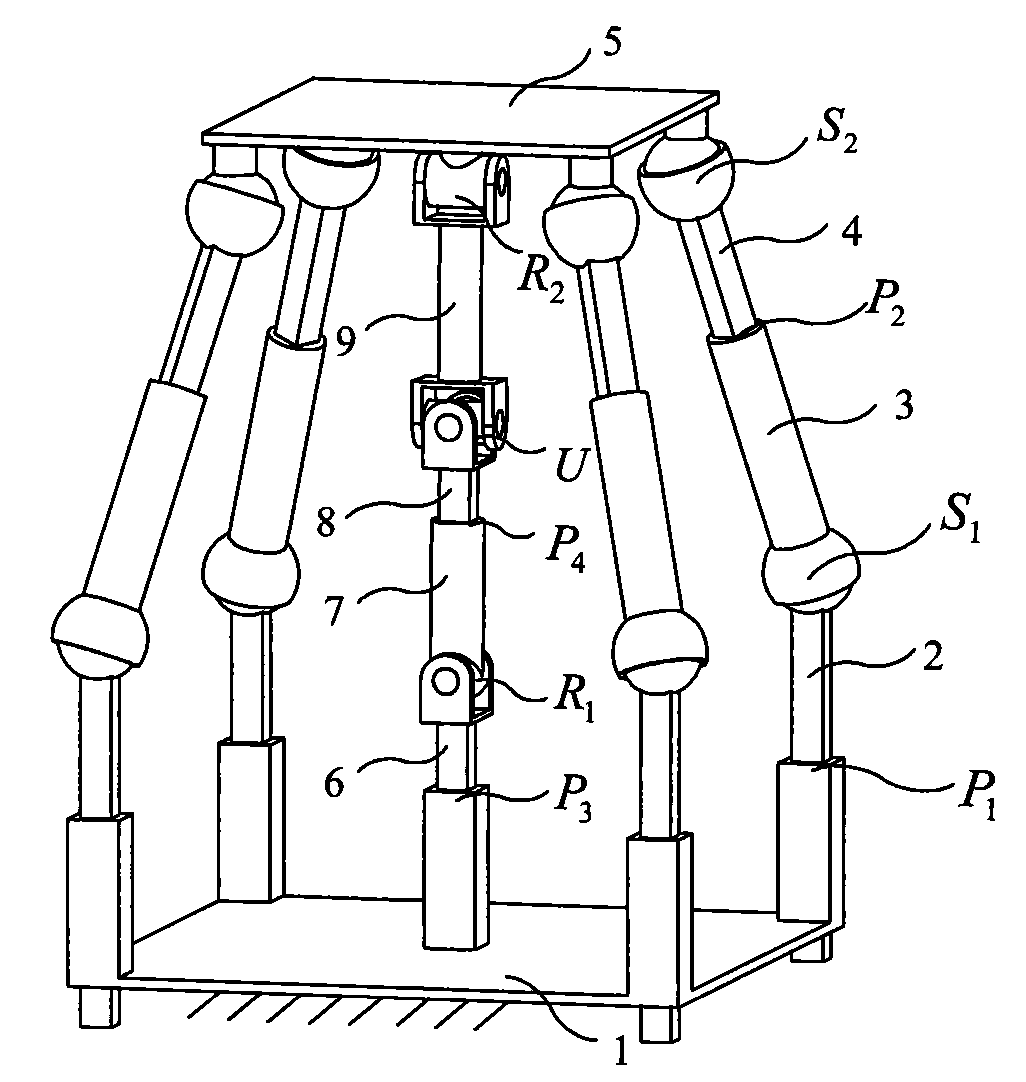
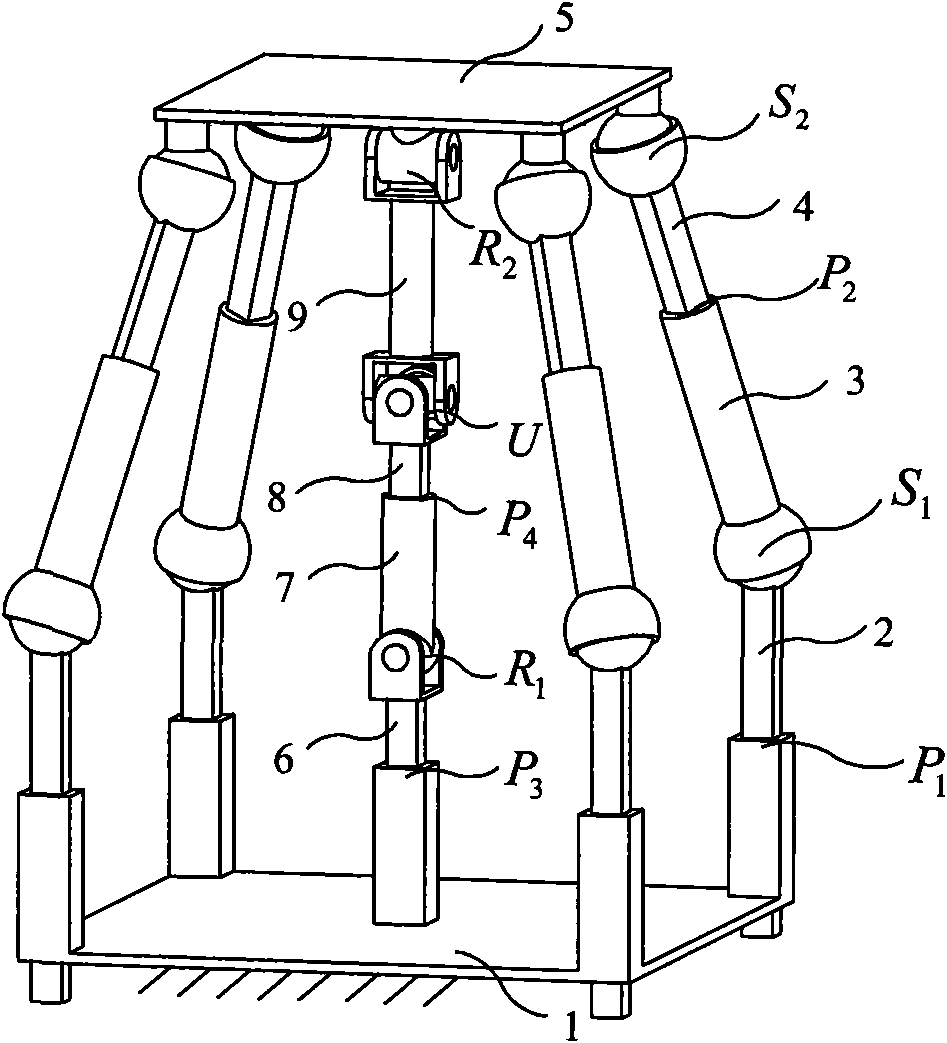
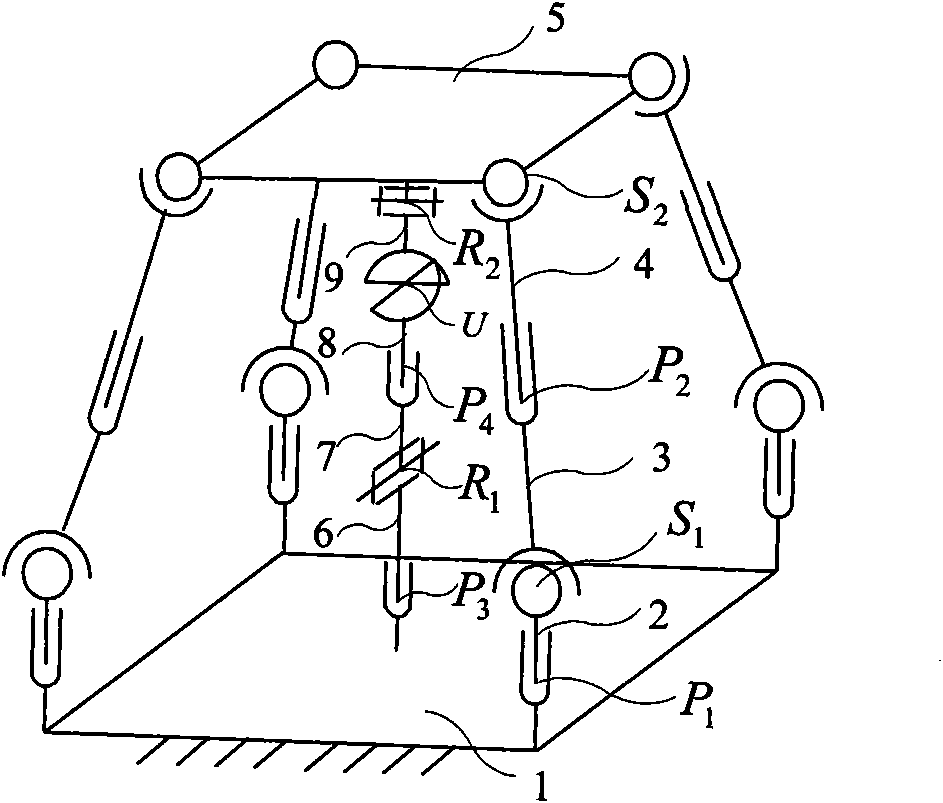
The invention belongs to the field of parallel mechanisms, more particularly relates to a five-freedom dual-driving parallel mechanism which is characterized by comprising a fixed platform (1), a movable platform (5), a middle PRPUR motion branch and four PSPS motion braches which are distributed at the periphery of the middle PRPUR motion branch and have the same structure, wherein two driving pairs in the PSPS motion branches are respectively a lower moving pair (P1) connected with the fixed platform (1) and an upper moving pair (P2) between an upper spherical pair (S1) and a lower spherical pair (S2); and two driving pairs of the middle PRPUR motion branch are respectively a middle lower moving pair (P3) connected with the fixed platform (1) and a middle upper moving pair (P4) connected with a Hooke hinge (U). The invention can realize three-dimensional motion and two-dimensional motion in space, has the advantages of relatively simple structure, large working space, high flexibility, and the like and can be used for developing a macro / micro dual-driving robot with large working space and high precision.
Description
Five-degree-of-freedom dual-drive parallel mechanism technical field The invention belongs to the field of parallel mechanisms, in particular to a five-degree-of-freedom dual-drive parallel mechanism. Background technique With the development of scientific and technological fields such as bioengineering, military engineering, optical communication engineering, microsurgery, microassembly, optical fiber docking, and CCD docking, higher requirements are put forward for robot systems, especially for robot systems. Higher precision and lower inertia in a larger workspace. The traditional robot system using a single drive pair has been unable to meet the above requirements, and the macro / micro dual drive robot system has the characteristics of large working space, high flexibility, low inertia and high precision, making it a research hotspot. However, most of the existing macro / micro dual-drive robot systems are directly connected in series with two single-drive robot systems,...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B25J9/08
Inventor赵铁石刘艳辉边辉冯海兵
OwnerYANSHAN UNIV