

Magnetic absorbing unit for underwater magnetic absorbing wheel-pedrail climbing robot
A technology of crawling robot and magnetic adsorption wheel, which is applied to underwater operation equipment, motor vehicles, ships, etc., can solve the problems that the crawler track is difficult to adapt to the change of the curved surface, the requirement of the flexible track strength is high, and the output torque of the motor is large, etc. The contradiction between tightness and sealing, the effect of reducing the load of the flexible track and reducing the power of the motor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
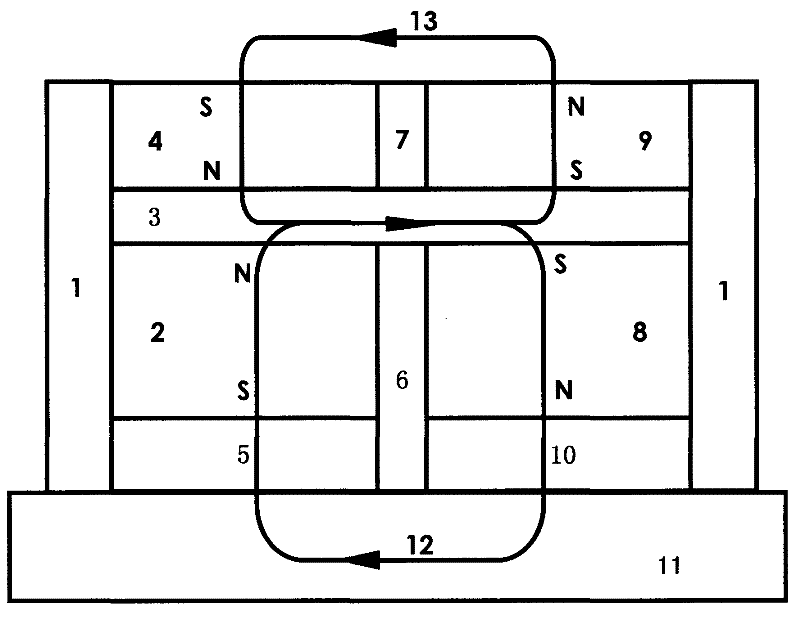
[0011] The specific structure and working principle of the present invention will be further described below in conjunction with the accompanying drawings. like figure 1 As shown, the present invention includes a magnetic isolation shell 1, a yoke iron 3, a first magnetic adsorption block 2, a second magnetic adsorption block 8, a first magnetic conductive steel plate 5, a second magnetic conductive steel plate 10 and a lower magnetic magnetic block arranged under the yoke iron The magnetic isolation block 6; the first magnetic adsorption block 2 and the second magnetic adsorption block 8 are respectively arranged on the first magnetic permeable steel plate 5 and the second magnetic permeable steel plate 10, the first magnetic adsorption block 2 and the second magnetic adsorption block The magnetic block 8 is separated by the lower magnetic spacer block 6 , and the first magnetically permeable steel plate 5 and the second magnetically permeable steel plate 10 are also separate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More