

Biplanar frictional two-freedom-degree joints based on hydraulic pressure
A dual-plane, degree-of-freedom technology, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of low positioning accuracy, inconvenient operation, cumbersome robotic arms, etc., achieve high safety, improve positioning accuracy and safety, Good joint stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
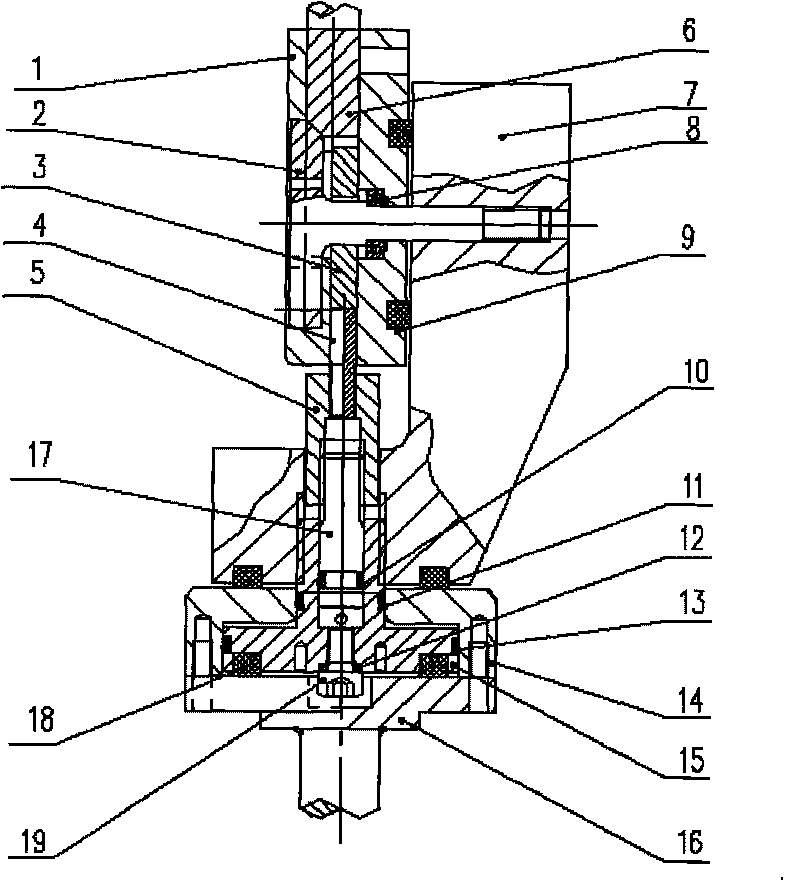
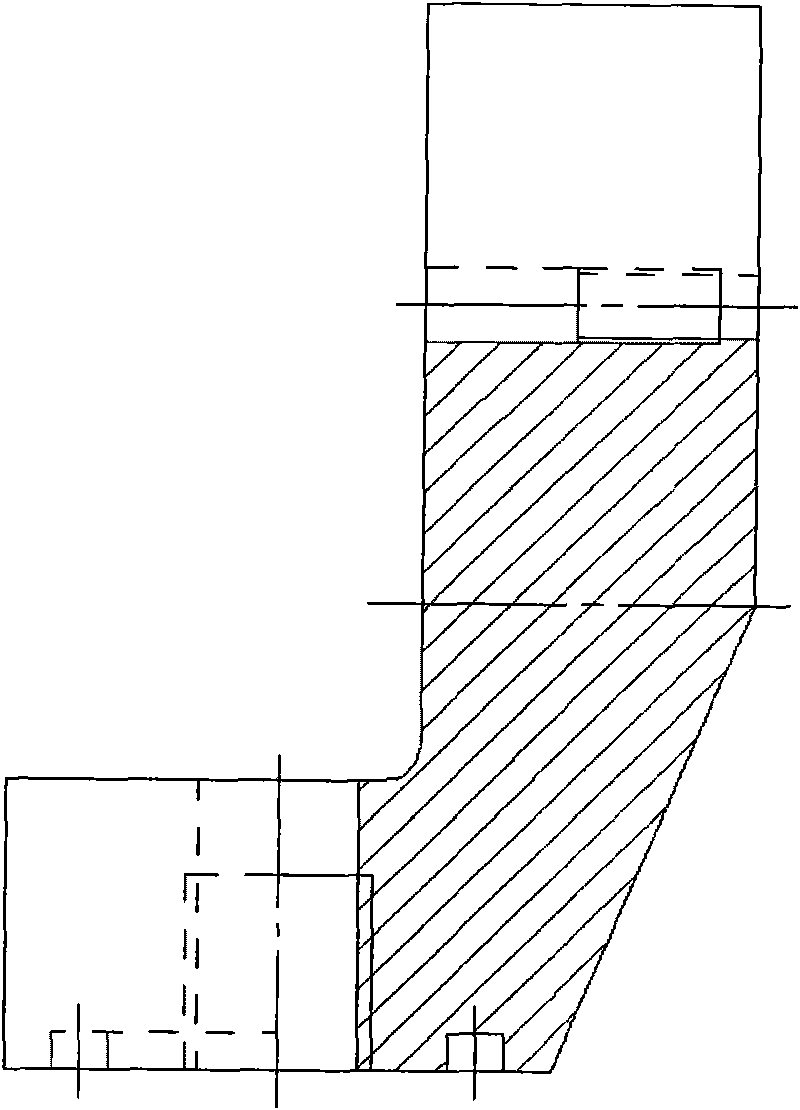
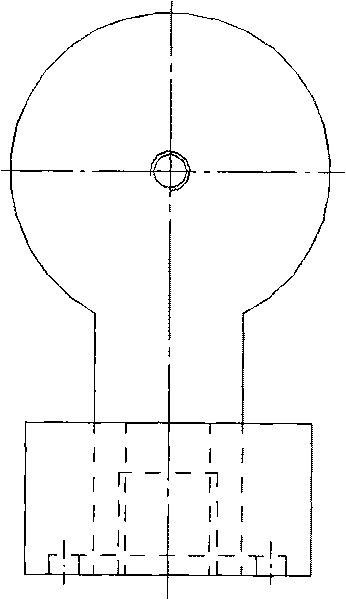
[0022] figure 1 It is a structural schematic diagram of the hydraulic-based dual-plane friction 2-DOF joint of the present invention; figure 2 for figure 1 The front view of the joint body in ; image 3 for figure 2 left view of Figure 4 for figure 2 bottom view of Figure 5 A schematic diagram of the lower joint assembly.
[0023] As shown in the figure, the hydraulic-based dual-plane friction 2-DOF joint of the present invention includes a joint body 7, a lower joint T-shape shaft 15 and an upper joint T-shape shaft 2, wherein the joint body 7 is in an "L" shape. The upper outer edge of the lower plane of the upper joint T-shaped shaft 2 is provided with a guide angle to form a wedge-shaped surface, and the end of the rod of the upper joint T-shaped shaft 2 is provided with external threads, and the upper joint shell 1 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More