Electronic map aided inertial navigation method in GPS dead zone
An electronic map and inertial navigation technology, applied in the field of navigation, can solve the problems of poor reliability and low system accuracy, and achieve the effect of improving accuracy and reliability and improving positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
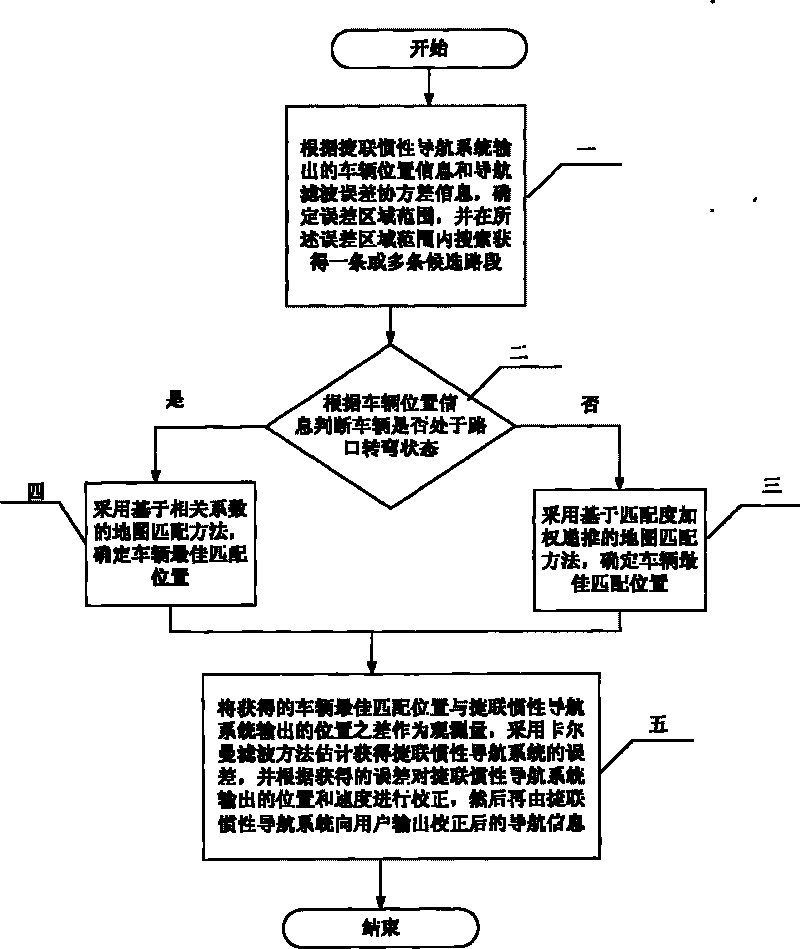
[0012] Specific implementation mode one: the specific process of a kind of electronic map-assisted inertial navigation method in the GPS blind area described in this implementation mode is:
[0013] Step 1: According to the vehicle position information output by the strapdown inertial navigation system and the navigation filter error covariance information, determine the error area range, and search and obtain one or more candidate road sections within the error area range;
[0014] Step 2: Determine whether the vehicle is turning at an intersection according to the vehicle location information, if not, go to step 3, if yes, go to step 4;
[0015] Step 3: Use the map matching method based on weighted recursion of matching degree to determine the best matching position of the vehicle, and then go to step 5;
[0016] Step 4: use the map matching method based on the correlation coefficient to determine the best matching position of the vehicle;
[0017] Step 5: The difference be...
specific Embodiment approach 2
[0056] Specific embodiment two: What this embodiment described is the method that the electronic map assisted inertial navigation method described in specific embodiment one in the GPS blind area is used in conjunction with the existing navigation method, and the specific method is:
[0057] To judge the validity of GPS, when GPS is valid, use the combination of SINS / GPS for navigation, use the difference between the position and speed information provided by GPS and the position and speed information of SINS as the observation, and estimate the error of SINS by Kalman filter method, Feedback correction of the position, velocity and attitude angle of SINS, the specific process is:
[0058] First, establish the mathematical model of SINS / GPS integrated navigation, including system equations and measurement equations.
[0059] The system equation is the SINS error equation ignoring the height channel:
[0060] X · 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com