

Large-scale formation relative navigation method
A relative navigation and large-scale technology, applied in the field of relative navigation, can solve problems such as inability to accommodate multiple situations of multiple navigation members, time difference, etc., and achieve the effect of reducing cost and weight, simple in principle, and easy to implement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
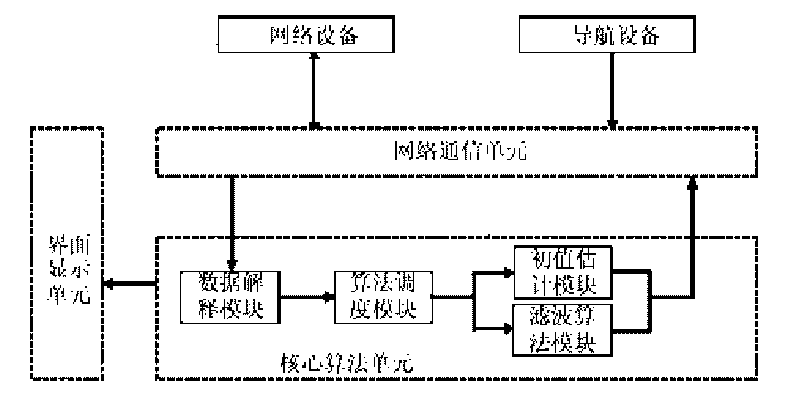
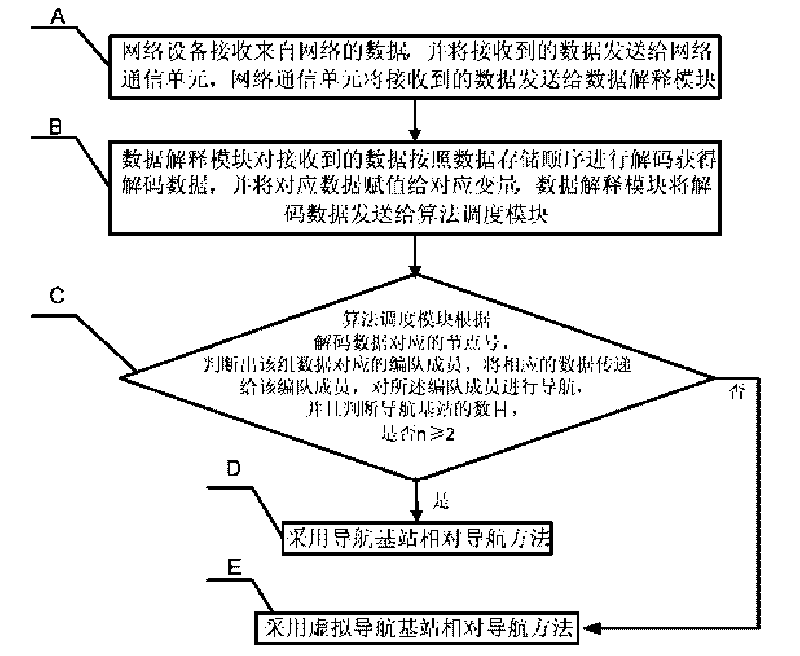
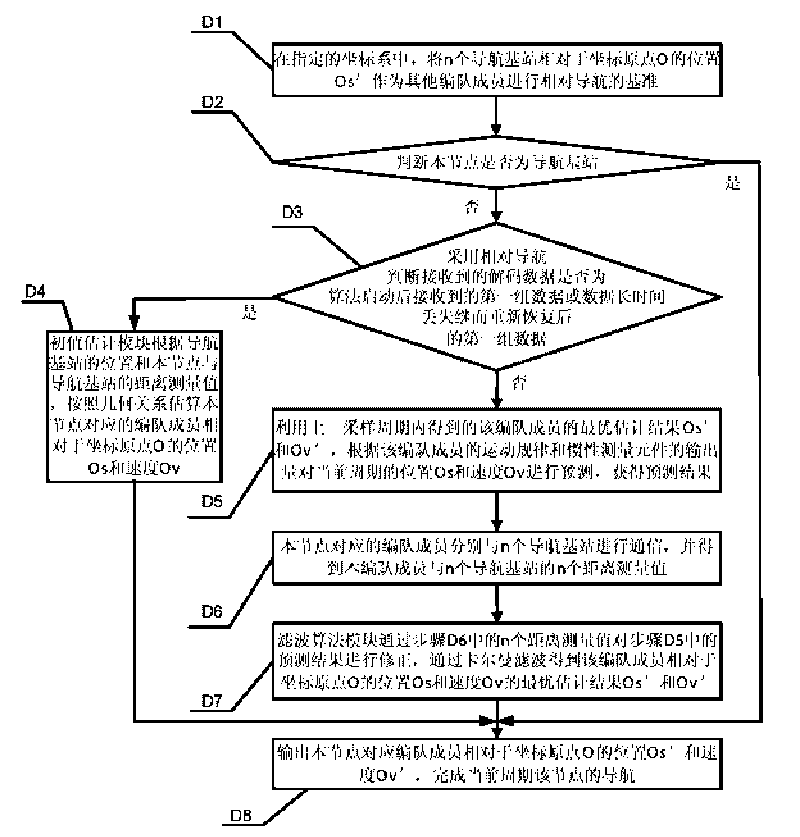
[0031] Specific implementation mode one: combine figure 1 , figure 2 , image 3 and Figure 4 Description of this embodiment, a large-scale formation relative navigation method is realized based on the following system, the system is composed of multiple formation members, and each formation member includes network equipment, navigation equipment, network communication units and core algorithms The network device is composed of a network controller and a network connection device. The core algorithm unit is composed of a data interpretation module, an algorithm scheduling module, an initial value estimation module and a filtering algorithm module. The data input / output port of the network device is connected to the network The network data input / output port of the communication unit is connected, the data output port of the navigation equipment is connected with the navigation data input port of the network communication unit, the data output port of the network communicati...
specific Embodiment approach 2
[0065] Specific implementation mode two: combination figure 1 and Figure 5 Describe this embodiment, the difference between this embodiment and specific embodiment 1 is that the structure of each formation member also includes an interface display unit, and the interface display unit is used to display the relative distance between each formation member in the entire formation , estimated position and trajectory, and the topology of the entire formation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More