

Omnibearing vision based method for identifying and positioning dynamic target
An all-round vision and dynamic target technology, which is applied in the field of target recognition and positioning based on all-round vision, can solve problems such as large amount of calculation, poor real-time performance, and missed detection of targets, and achieve the goal of improving accuracy and reducing the amount of calculation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
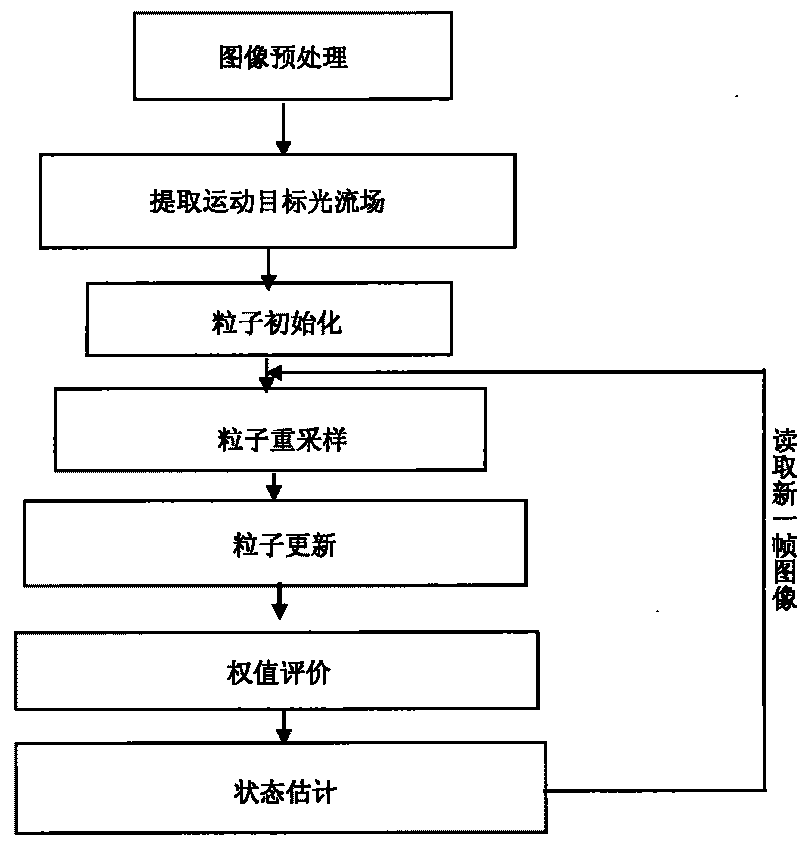
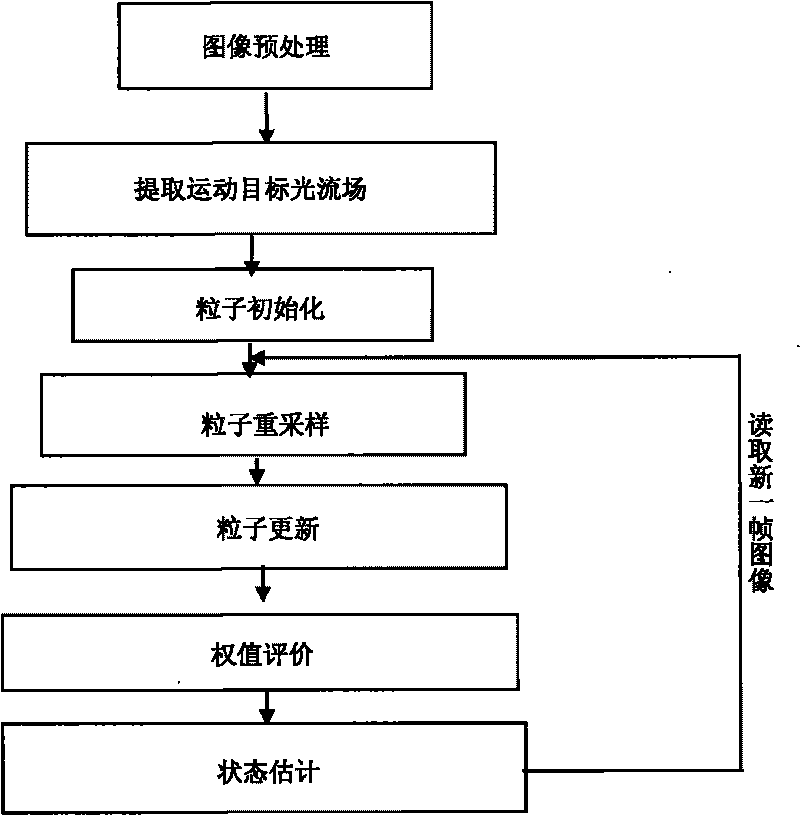
[0027] see figure 1 , the present invention's dynamic target recognition and location method based on omnidirectional vision, comprises the following steps:
[0028] Step 1: Obtain an omnidirectional visual sequence image, preprocess the image, separate the target from the background, and prepare for the subsequent optical flow field calculation. The image is pre-smoothed through a Gaussian low-pass filter, and then gradient sharpening is performed to find the moving edge of the image object. In order to segment the target object and the background, a threshold segmentation is performed. First, determine a threshold directly through the histogram, and dynamically adjust the threshold for the sequence image, and then compare the gray value of each pixel in the image with the threshold. If it is greater than the threshold, set the gray value of the pixel to be 255 (representing the background), otherwise the gray value of the pixel is set to 0 (object), thus distinguishing the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More