

Locust-simulated bouncing and turning robot
A technology of robots and locusts, applied in the field of robots, can solve problems such as instability, poor jumping ability at the take-off stage, long working life, etc., to achieve the effect of reducing energy consumption and improving mobility
Inactive Publication Date: 2010-06-02
BEIHANG UNIV
View PDF0 Cites 16 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0005] The mobile mobility is not strong, the jumping ability is poor during the take-off stage, the impact is large and unstable when landing, and the robot is not highly intelligent
In addition, due to the limitation of its own load weight, batteries that meet the requirements cannot guarantee a long working life
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment
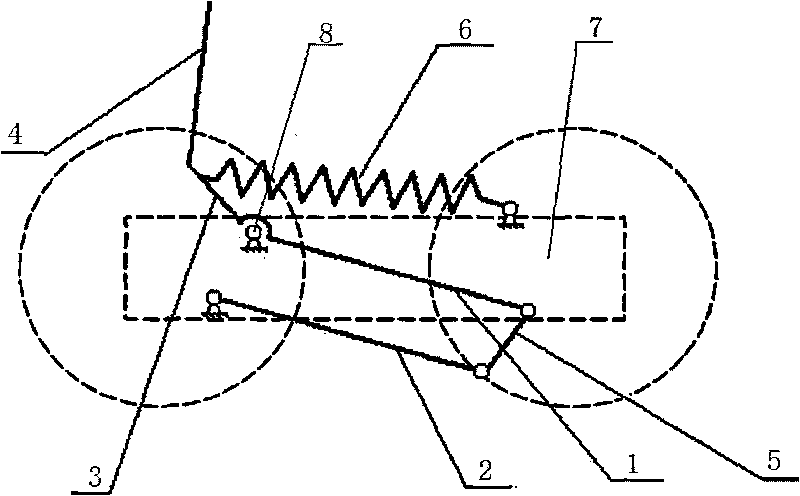
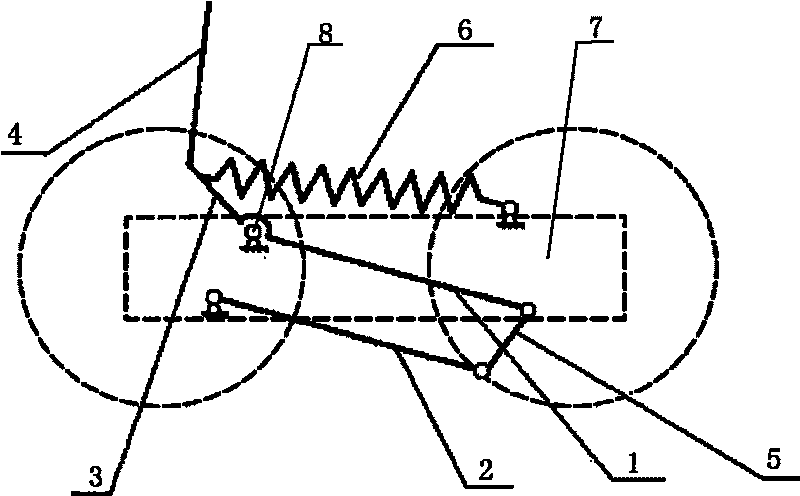
[0048] The hinged position of the front leg jumping support rod 1 and the body is located in the middle of the body, and the distance between the rear leg jumping support rod 2 and the hinged position of the body is 4.7cm, and the angle between the two lines and the horizontal direction is 25°;
[0049] The length of the front leg jumping support bar 1 is 9 cm, parallel and equal to the rear leg jumping support bar 2, and the length of the connecting rod hinged with the support bar 1 and the rear end of the support bar 2 is also 4.7 cm;
[0050] Transition bar 3 lengths are 3.5cm, link to each other with a spring between the connecting rod midpoint of its end and the body, spring rate coefficient 8N / cm, former long 5.7cm.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
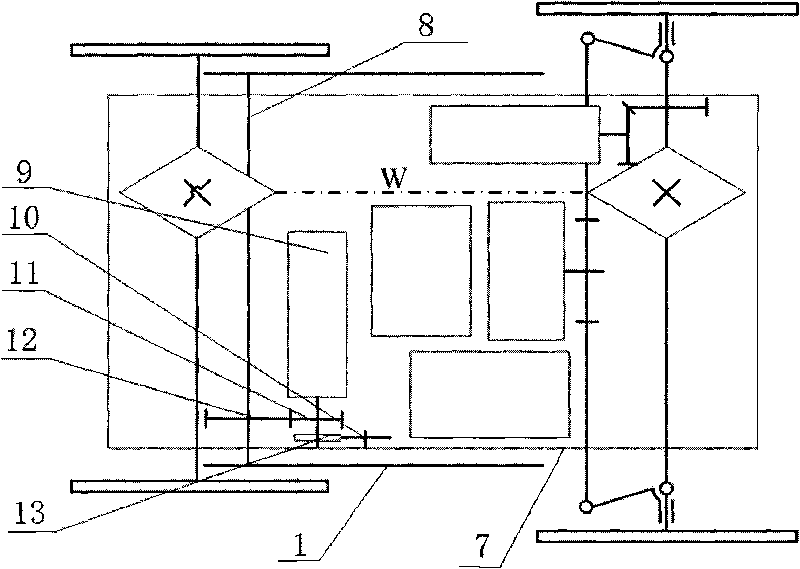
The invention discloses a locust-simulated bouncing and turning robot. A foreleg bounce-supporting rod and a drawleg bounce-supporting rod are respectively mounted at both sides of a body, have the same length and are arranged in parallel; the front ends of the legs are respectively articulated on the body; the rear ends are mutually articulated by a parallelogram linkage; the front end of the foreleg bounce-supporting rod is fixedly connected with a transmission rod; a spring is arranged between the transmission rod and the body; the foreleg bounce-supporting rod is driven by a full gear and a notch gear which are mutually engaged to intermittently rotate, store and release energy and realize bounces; and the tail end of the transmission rod at one side of the body is fixedly connected with a turning rod piece to form a turning device. The locust-simulated bouncing and turning robot can stably bounce and can bounce again under the condition that the landed body is possible to turn up so as to uprightly land and continuously bounce and turn up. The locust-alike bouncing and turning robot consumes low energy and can realize automatic control, thereby being suitable for complicated environments.
Description
technical field [0001] The invention relates to a robot, in particular to a locust-like bouncing and flipping robot. Background technique [0002] In order to solve the obstacle-crossing problem of miniature mobile robots, various high-mobility and high-obstacle-crossing robots have been explored and researched. Among them, the mobile robot with the ability to bounce not only has the ability to move on a two-dimensional plane, but also can jump over the data. times or even dozens of times its own size. Therefore, the mobile bouncing and flipping robot with compound motion ability makes up for the shortcomings of traditional mobile robots with only a single motion mode, greatly expands the application range of micro-robots, and has broad application prospects. Especially in interstellar exploration, since the gravitational acceleration on the surface of the moon and Mars is lower than that of the earth (38% on Mars and 17% on the moon), the advantage of bouncing motion can b...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B62D57/032
Inventor陈殿生黄宇沈奇郑万军王田苗
OwnerBEIHANG UNIV