

Unscented Kalman filter-based method for tracking inertial pose according to acceleration compensation
An unscented Kalman, acceleration technology, applied in directions such as navigation through velocity/acceleration measurement, can solve the problem of not considering the influence of the device system accuracy, and the accuracy cannot be guaranteed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
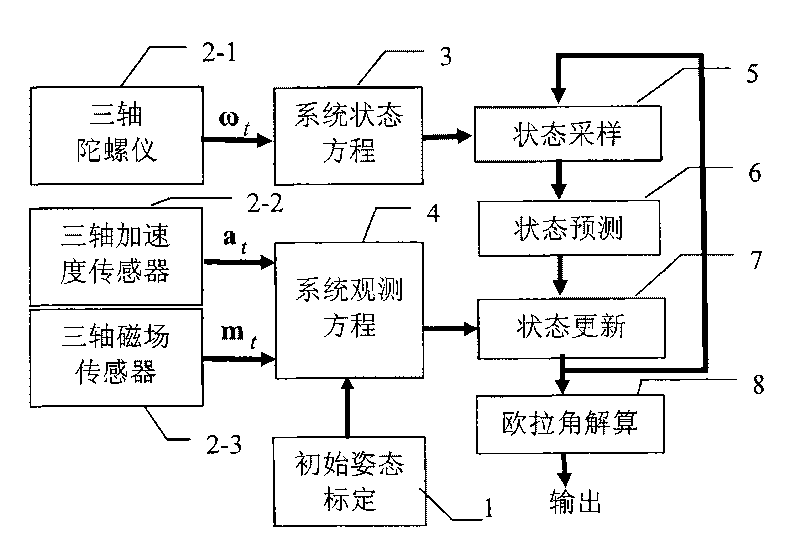
[0067] An inertial pose tracking method considering acceleration compensation and unscented Kalman filtering of the present invention adopts such as figure 1 The shown structure mainly includes the following steps:
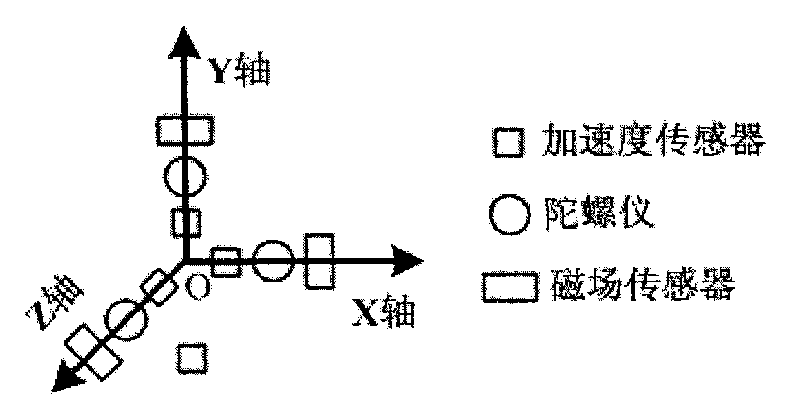
[0068] 1) Initial attitude calibration (1): Keep the device fixed, the current attitude is called the initial attitude, and the coordinate system determined by the three orthogonal axes of the device is used as the world reference coordinate system; Axis magnetoresistive sensor data to obtain the initial acceleration vector a described in the world coordinate system o =[a ox , a oy , a oz ] T and the magnetic field vector m o =[m ox , m oy , m oz ] T ;
[0069] 2) Collect the data of the three-axis gyroscope (2-1), the three-axis acceleration sensor (2-2) and the three-axis magnetoresistive sensor (2-3) at time k to obtain the current rotation angular velocity vector described in the device coordinate system ω t (k)=[ω tx (k), ω ty (k), ω tz (k)] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More