

Multidomain uniform modeling and emulation system of space robot
A technology of space robot and simulation system, applied in the field of unified modeling and simulation system of space robot in multiple fields, can solve the problems of multi-domain modeling and simulation of space robot system that have not been seen before, and achieve the effect of good reusability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] 1. The multi-domain functional module division of the space robot system and the composition of the modeling and simulation system
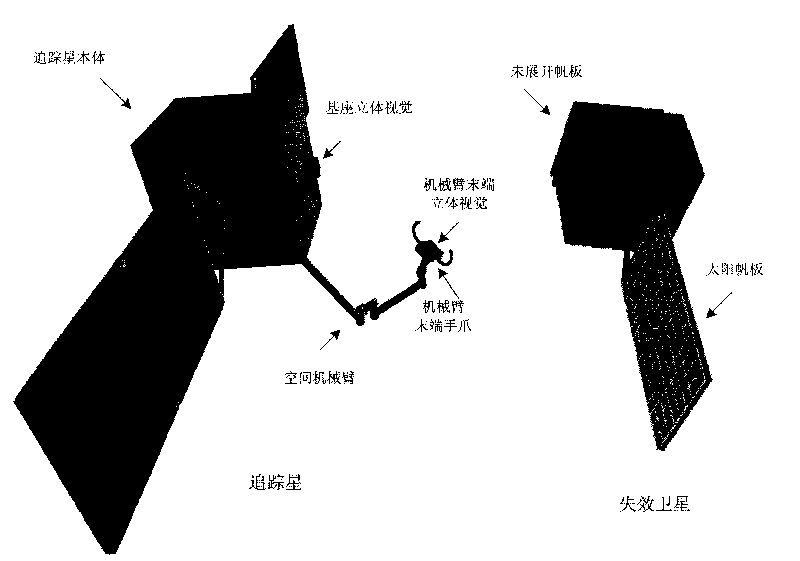
[0043] A typical space robot on-orbit service system consists of a flight base and a space manipulator, such as figure 1 shown. Among them, the target measurement system, docking mechanism, attitude and orbit control system, etc. are installed on the flight base, and the space manipulator can be composed of a 6DOF robotic arm, a grasping claw and hand-eye vision. Space objects may be faulty satellites (such as solar panels not deployed), abandoned satellites or space debris, etc. To realize the modeling of a complete space robot on-orbit service system, the following functional modules need to be included:
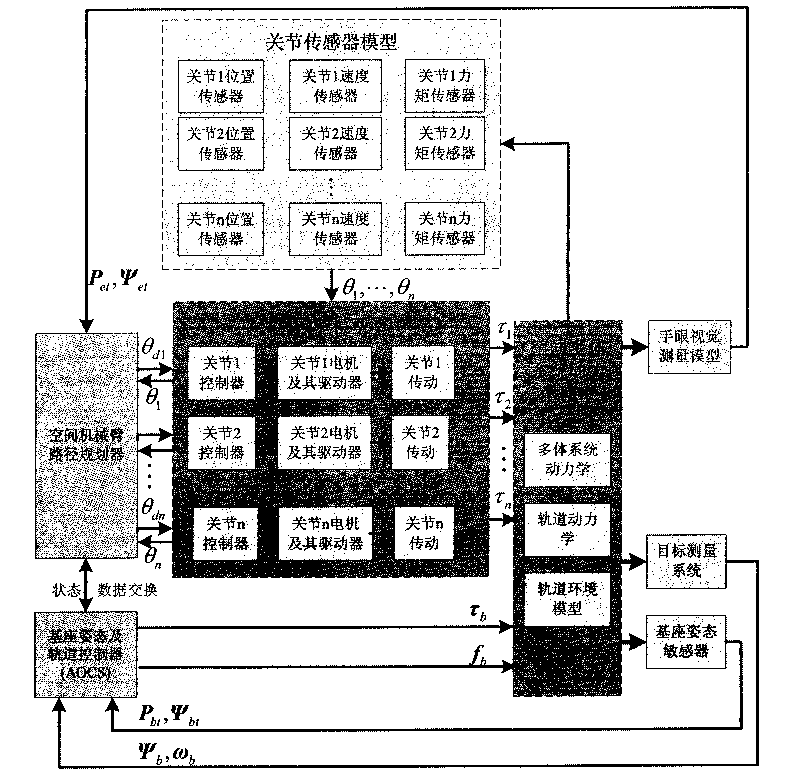
[0044] (1) Space robot system dynamics module, including multi-body dynamics model, track dynamics model, track environment model, etc. of the space robot system;
[0045] (2) Joint model: including joint i (i=1,...,6) controller, m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More