

Quaternion-based five-coordinate spline interpolation control method
A control method and five-coordinate technology, applied in the direction of digital control, electrical program control, etc., can solve the problems of discontinuity, destruction of track accuracy, transmission error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0017] Specific implementation mode one: the steps of this implementation mode are as follows:
[0018] Step 1, read the track data on the curve of the part design drawing by the CAM software, and establish the CAM tool path;
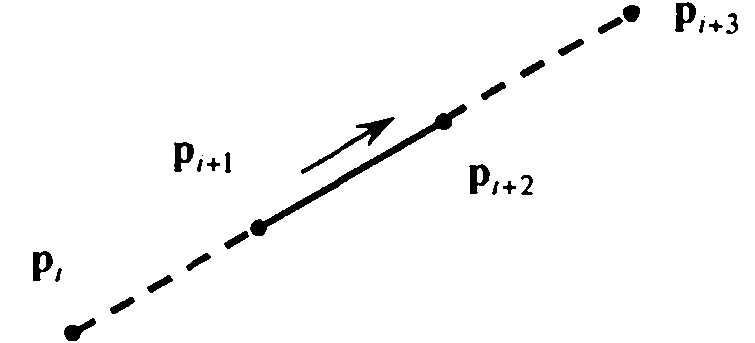
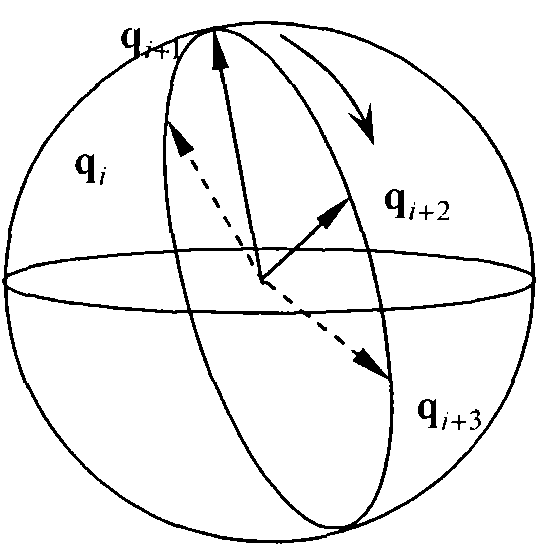
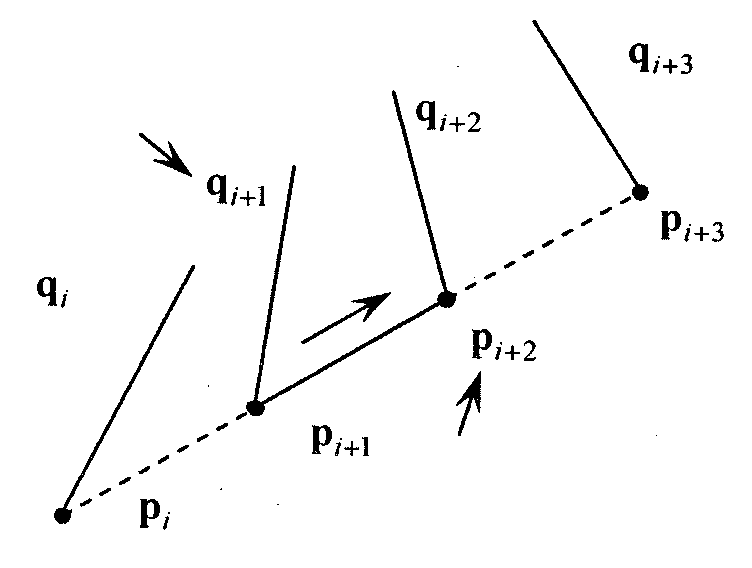
[0019] Step 2. Convert the CAM tool path to the five-coordinate spline interpolation NC code format; the five-coordinate spline interpolation NC code format is divided into three forms: linear translation five-coordinate spline interpolation NC code format, linear rotation five Coordinate spline interpolation NC code format and general five-coordinate spline interpolation NC code format;
[0020] Step 3. Convert the three five-coordinate spline interpolation NC code formats into joint motion programs through the inverse dynamics transformation formula. The formula is:
[0021]
[0022]
[0023] X = ( X W ...
specific Embodiment approach 2
[0025] Embodiment 2: This embodiment differs from Embodiment 1 in that the CAM tool path is divided into a translation path, a pure rotation path, and a compound path of translation and rotation. Other compositions and connection methods are the same as those in Embodiment 1.
specific Embodiment approach 3
[0026] Embodiment 3: The difference between this embodiment and Embodiment 2 is that the translation path and the pure rotation path, and the compound path of translation and rotation are respectively composed of translation cubic uniform B-spline, rotation triple uniform quaternary B-spline and double cubic uniform B-splines to describe. Other compositions and connection methods are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More