

Real-time pose capture-based surgery simulation system, method and graph rendering module
A simulation system and posture technology, applied in the field of virtual surgery simulation system, can solve the problems of high training cost, complex structure, difficult maintenance, etc., and achieve the effect of fast response, high precision and strong interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The operation simulation system and method based on real-time pose capture and the graphics rendering module of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
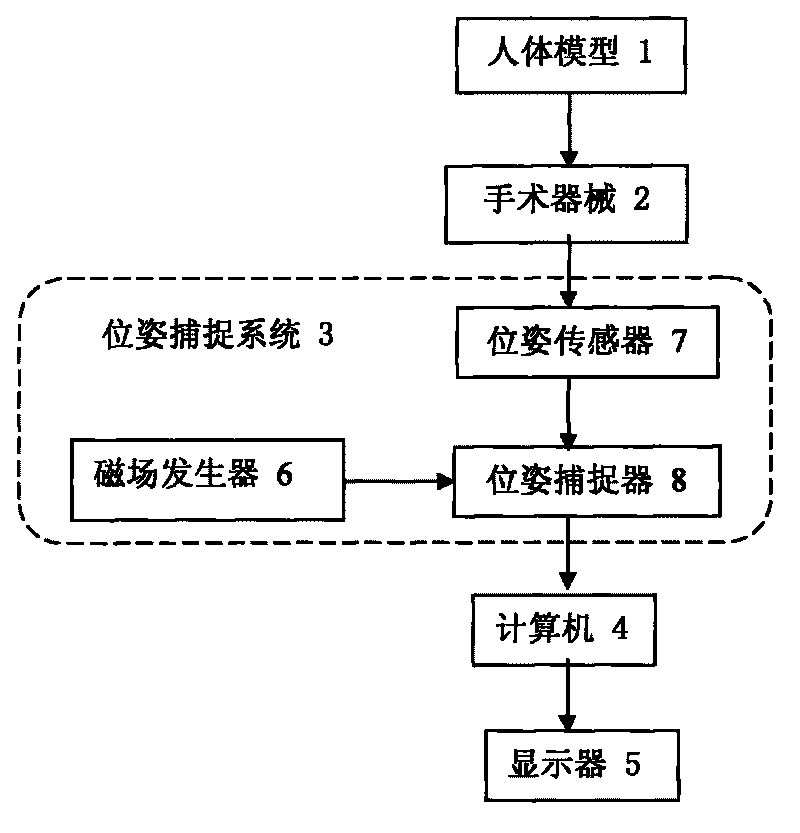
[0032] Such as figure 1 As shown, the virtual surgery simulation system based on real-time pose capture technology of the present invention includes a physical model 1, surgical instruments 2, pose capture system 3, computer 4 and display 5, wherein the surgical instruments 2 correspond to The physical model 1 and the pose capture system 3 , the output of the pose capture system 3 is connected to the computer 4 , and the computer 4 is connected to the display 5 .
[0033] The surgical instruments 2 include needle-shaped surgical instrument needles and cannulae.
[0034] The solid model 1 includes: a skeleton model, a muscle tissue model, a nerve model and a human body model. The solid skeleton model obtains the 3D model of the real person'...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More