

Shape-changeable moving mechanism capable of driving salvation robot on multiple directions
A mobile mechanism, multi-directional technology, applied in motor vehicles, life-saving equipment, respiratory protection containers, etc., can solve the problems of poor step ability, difficult to control balance, large size, etc., and achieve light weight, small size, and energy saving. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The content of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
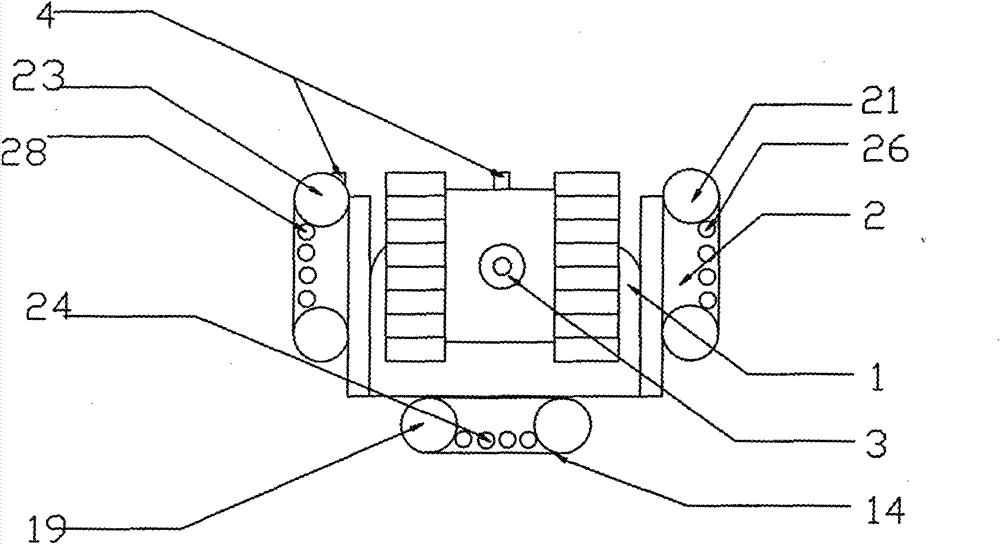
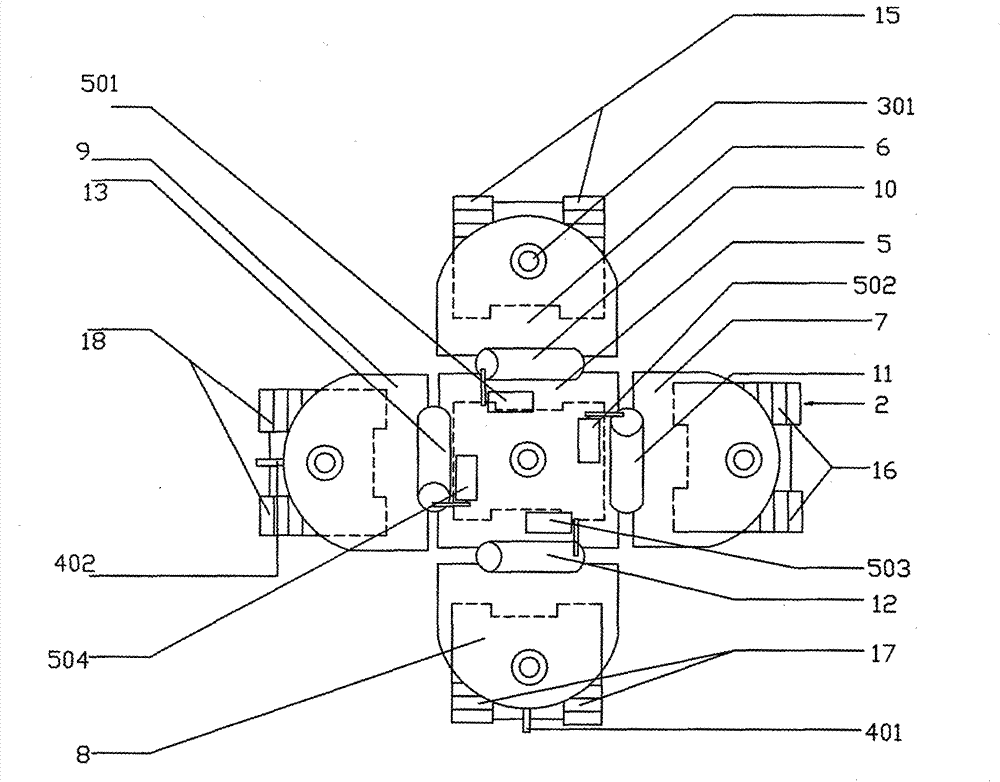
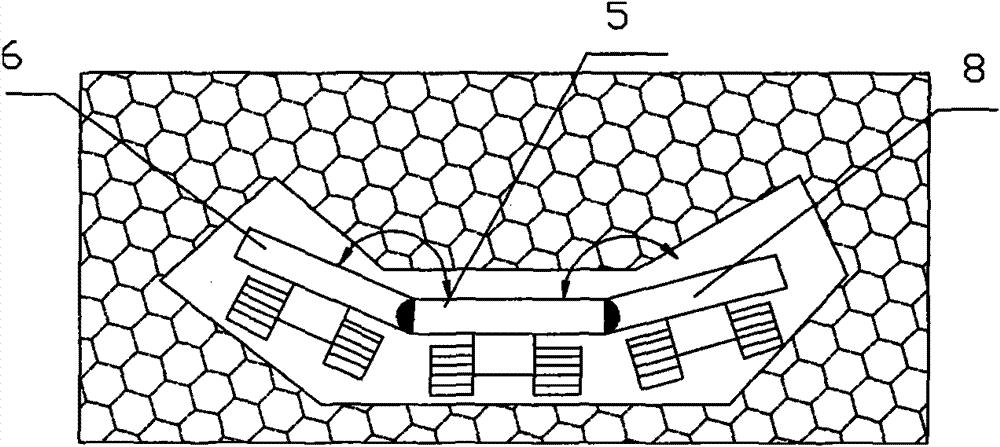
[0026] Next, further describe the moving mechanism of a shape-variable / multi-directional driving rescue robot of the present invention. The four sides are respectively connected with the pivot seats on the central plane through pivots; each side is provided on the central plane by The corresponding drive motors in the drive motor group are independently driven to realize the rotation around the pivot, unfold, close, and transform the shape as required; the crawler-type mobile mechanism includes five identical crawler-type mobile units, and each crawler-type mobile unit It includes two drive motors, two tracks, track drive wheels and track tension adjustment wheel sets, where each track is independently driven by a motor, and the movement and rotation of the mechanism can be realized through the speed difference between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More