Inspection robot mechanism with lifting and clamping functions
A technology of inspection robot and clamping mechanism, which is applied in the field of mobile robots, can solve the problems of difficult ultra-high-voltage transmission line inspection operations, complex structure of inspection robots, and complicated process of crossing obstacles, and achieves good adaptability to diameter changes and low weight. Lightweight and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
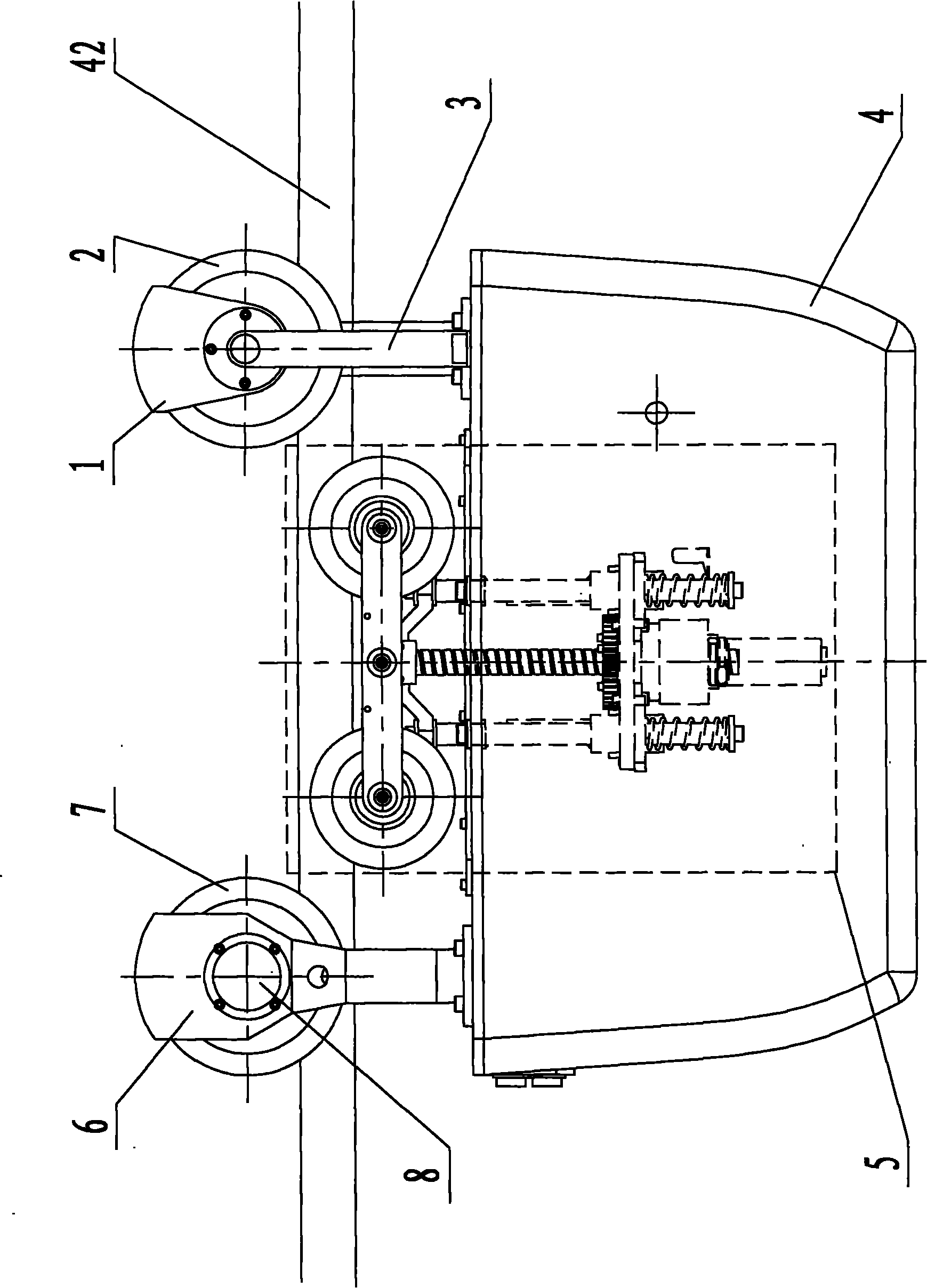
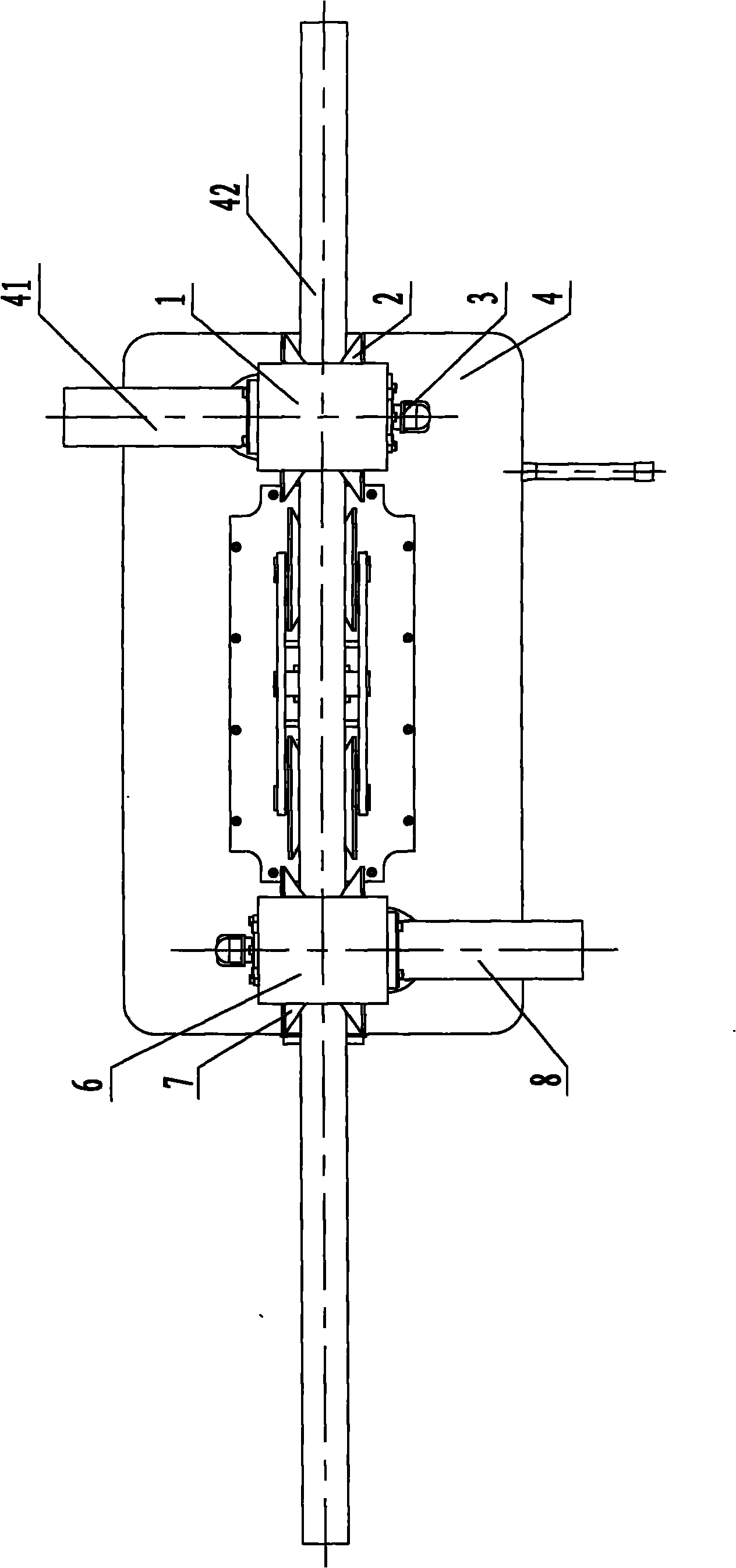
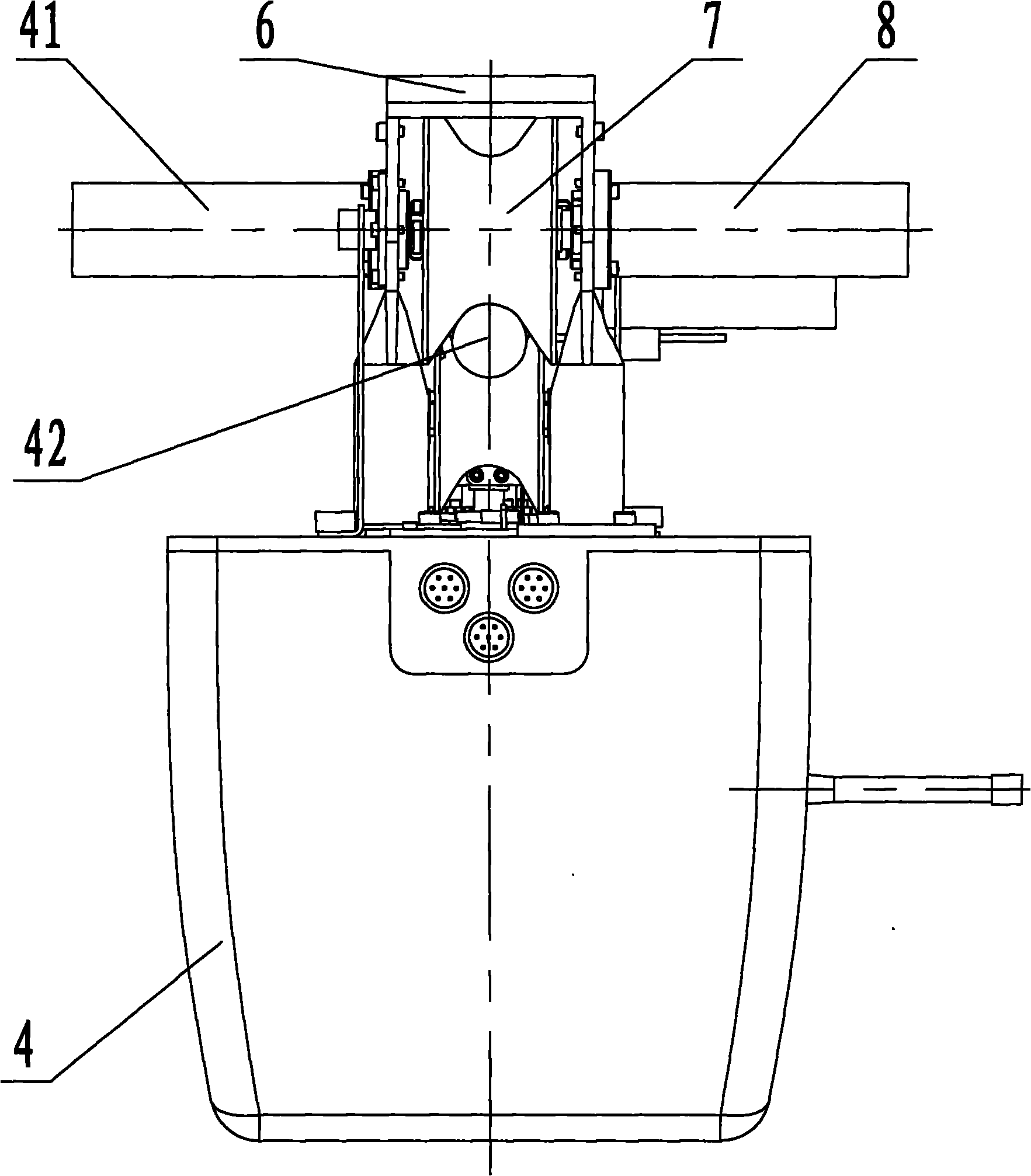
[0022] Such as Figure 1-7 As shown, the present invention is used for inspection operations on overhead power transmission lines, including a front arm 1, a front travel wheel 2, a rear arm 6, a rear travel wheel 7, a box body 4 and a lifting and clamping mechanism 5, and on the box body 4 Front and rear arms 1,6 are respectively provided, and front and rear traveling wheels 2,7 are mounted on front and rear arms 1,6 through bearings respectively, and front and rear traveling motors 41 are respectively provided on front and rear arms 1,6. , 8, the front and rear travel motors 41, 8 drive the front and rear travel wheels 2, 7 to rotate respectively, and realize walking on the overhead ground wire 42. Inside the box body 4 is provided with a lifting and clamping mechanism 5 that increases the positive pressure of the front and rear traveling wheels 2 and 7 on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More