

Method for calibrating camera by utilizing concentric circles
A technology of camera calibration and concentric circles, which is applied in the field of image processing and can solve the problems of large influence of noise and complicated methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
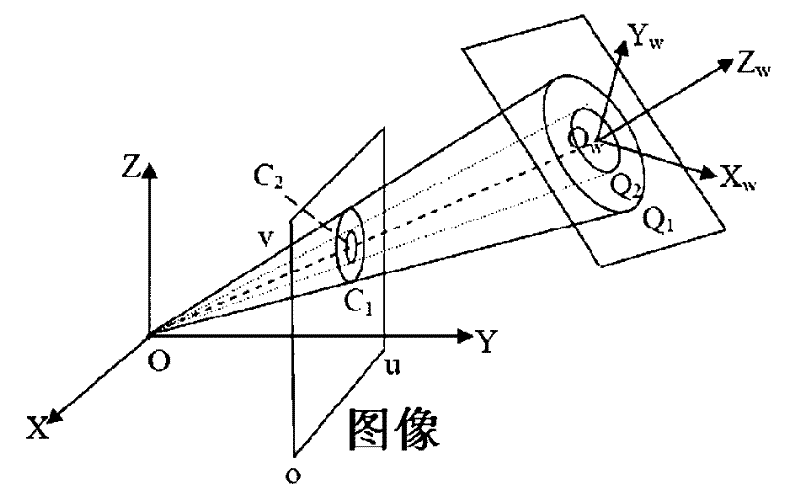
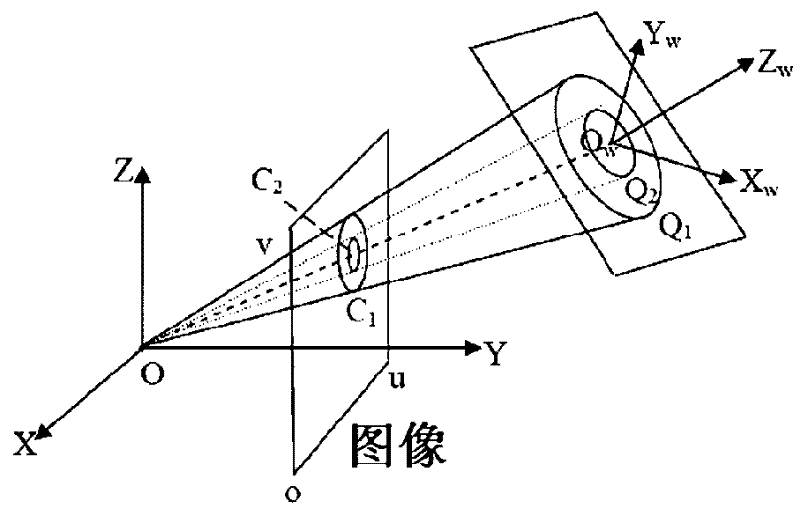
[0019] like figure 1 Shown is a schematic diagram of the projection of the calibration object template used in this embodiment on the image plane. figure 1 Among them, OXYZ is the camera coordinate system, O w x w Y w Z w is the world coordinate system, and ouv is the image coordinate system. R and t represent the rotation matrix and translation vector between the camera coordinate system and the world coordinate system, respectively, where
[0020] R=[r 1 r 2 r 3 ], r i , i=1, 2, 3 represent each column of R.
[0021] The specific implementation process of this embodiment is as follows:
[0022] 1. F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More