

Servo system control method based on relay feedback
A technology of servo system and control method, applied in the direction of motor control, control system, electrical components, etc., can solve problems such as unfavorable practical application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0046] The servo system of this embodiment is Yaskawa SGMAH-A5AAA41 AC servo motor and supporting servo controller SGDM-A5ADA. This embodiment includes the following steps:
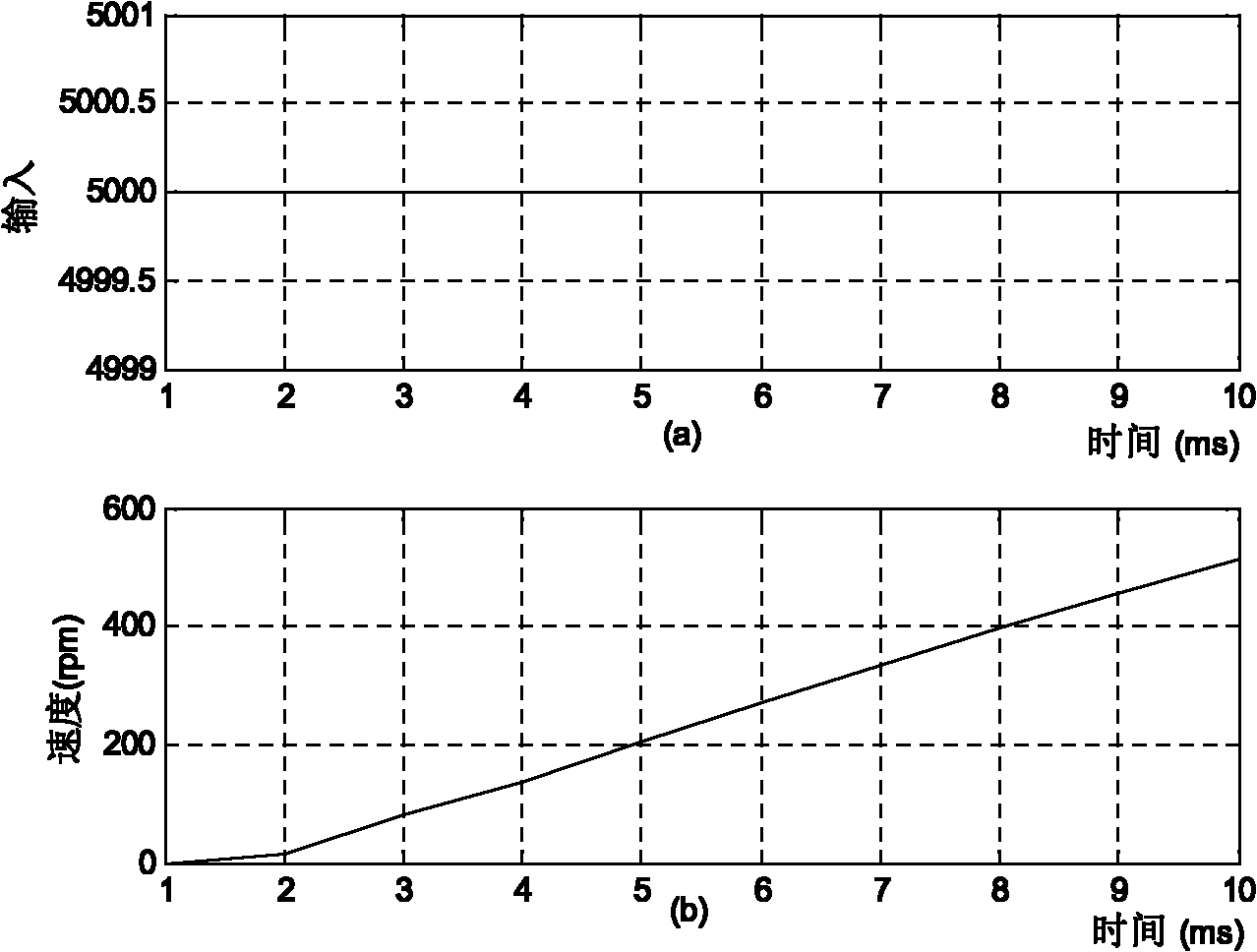
[0047] Step 1: Set the servo system to torque control mode, and set the upper limit of the servo system's operating speed ω u =3000rpm, the lower limit of the servo system's movement speed ω l =600rpm, relay delay d=25ms, initial amplitude h 0 = 5000 and initial motion time t 0 = 10ms.
[0048] Step 2, at the initial motion time t 0 = Within 10ms, use the initial amplitude as h 0 The relay of =5000 performs the first motion control on the servo system, and obtains the speed ω of the servo system at the end of the first motion control 0 = 500rpm.
[0049] The input curve obtained in this motion control is as follows: figure 1 As shown in (a), the response curve is as figure 1 (b) shown.
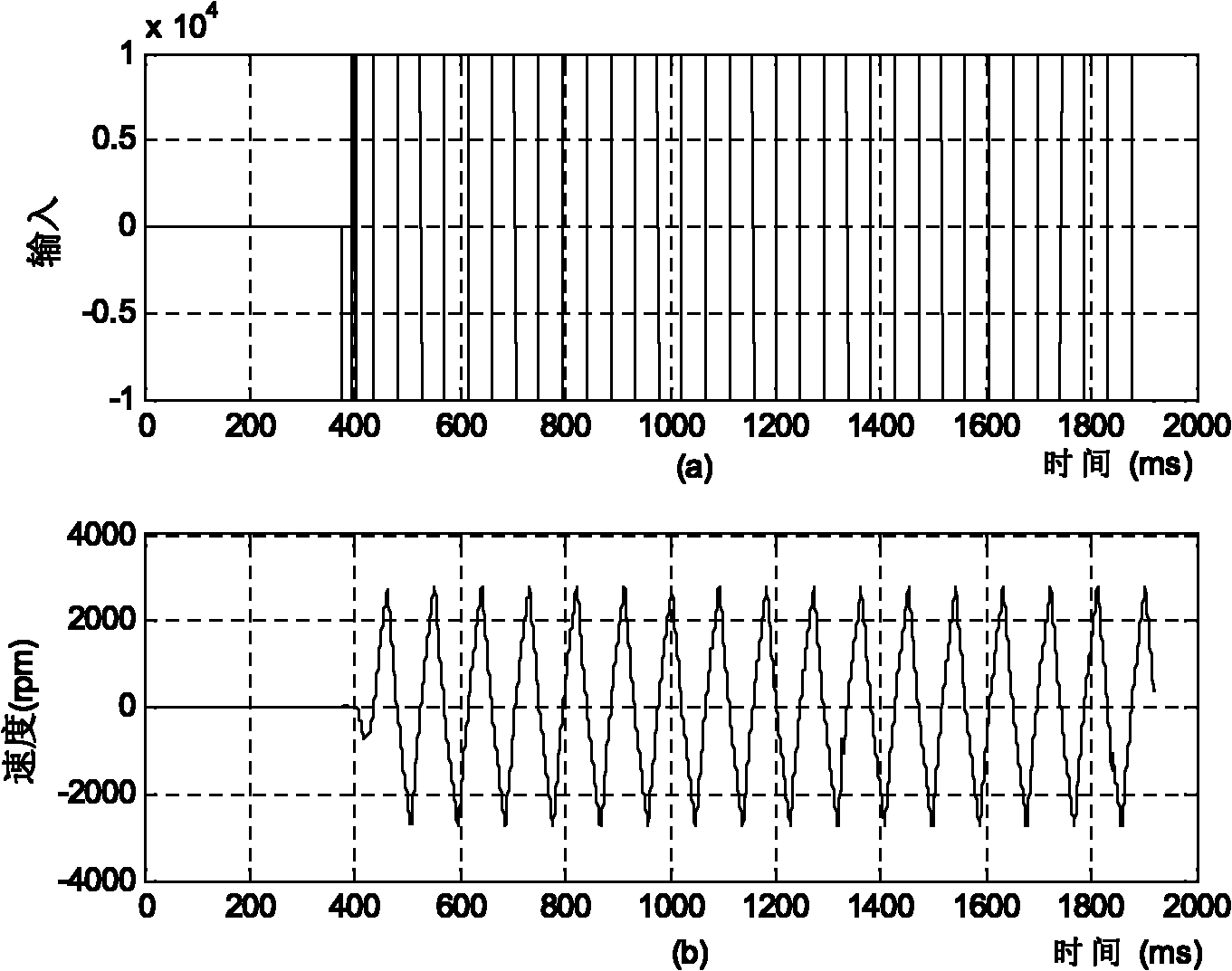
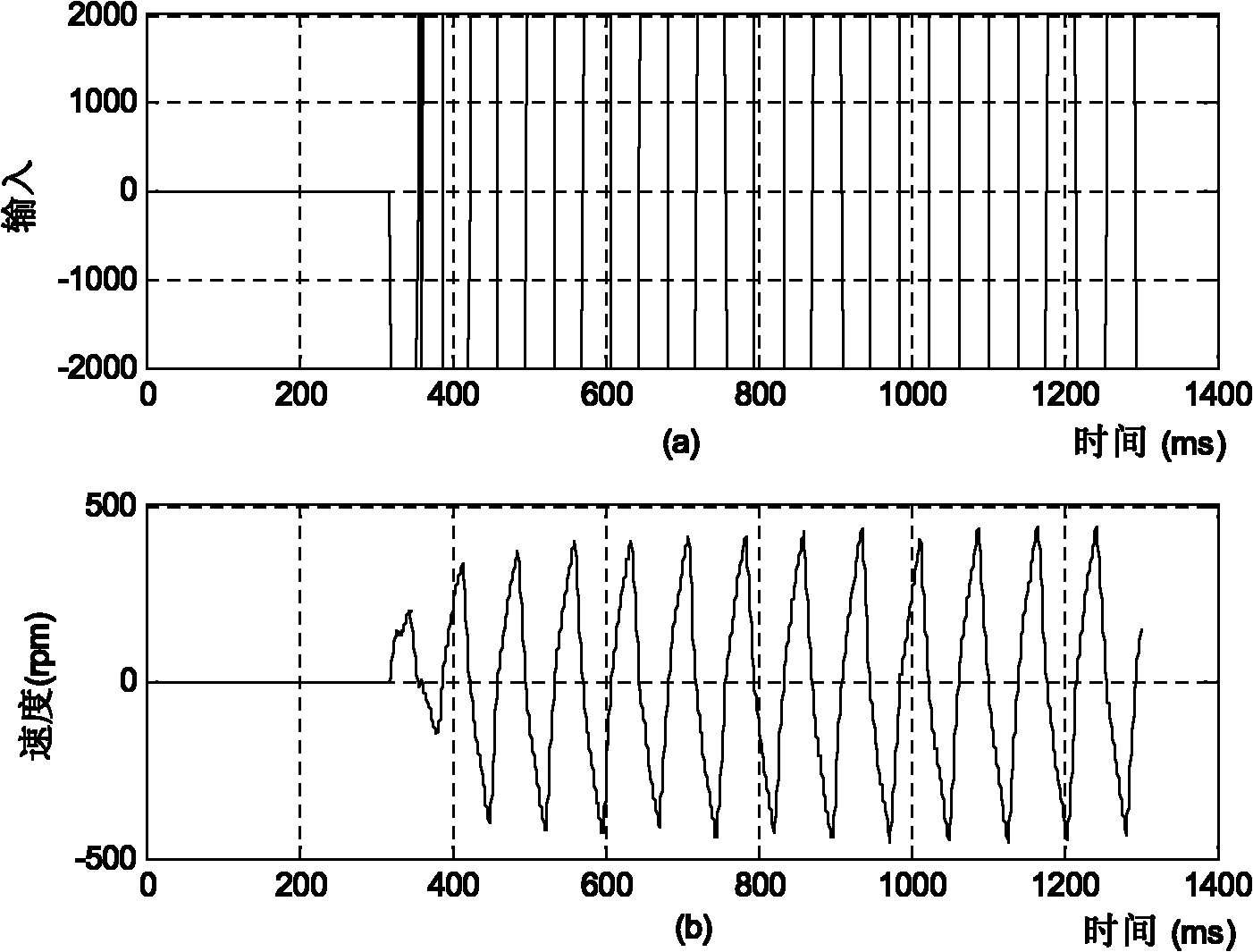
[0050] Step 3, give the servo system a pulse command to make the servo system move slightly, within the delay ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More