

Moving mechanism of hydraulic drive four-leg robot with barycenter adjusting device
A quadruped robot and adjustment device technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as limited obstacle surmounting ability, small dynamic range, poor dynamic response ability and load-bearing ability, and achieve large and stable working space The effect of good sex and large load-bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
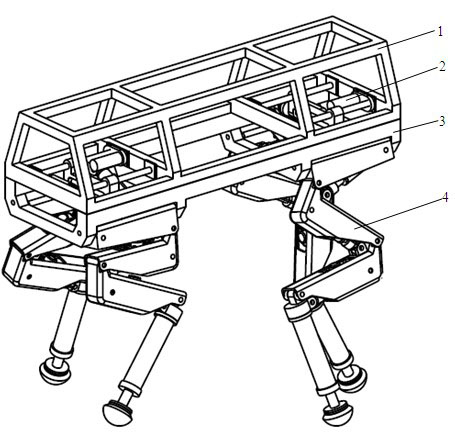
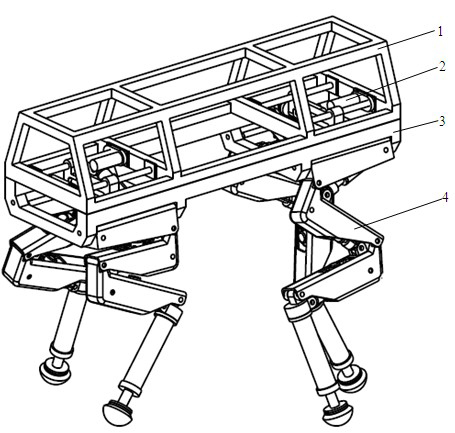
[0040] As shown in FIG. 1 , the present invention includes a torso 3 , a mobile frame 1 , a center-of-mass adjustment device 2 and four robot legs 4 . The lower part of the torso 3 is provided with four robot legs 4 , and the upper part of the torso 3 is connected with the mobile frame 1 through the center of mass adjustment device 2 .
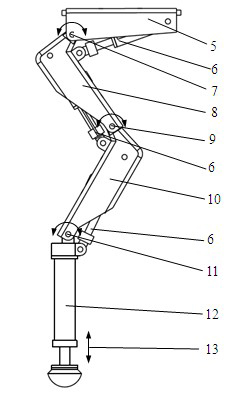
[0041]Each robot leg is composed of three leg segments (leg segment I5, leg segment II8, and leg segment III10) and a lower leg 12 (see Figure 2). The lower leg 12 is set at the lower part of the three leg segments. The longitudinal rotation joint IV14 of the torso is connected with the trunk 3 (see Fig. 3), and the joints between the leg segment I5 and the leg segment II8, the leg segment II8 and the leg segment III10, and the leg segment III10 and the lower leg 12 are all passed through the axis along the lateral rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More