

Six-degree-of-freedom flexible mechanical arm based on pneumatic muscles
A technology of mechanical arms and pneumatic muscles, applied in the field of bionic robots and rehabilitation robots, to achieve the effect of strong bearing capacity, novel structure and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
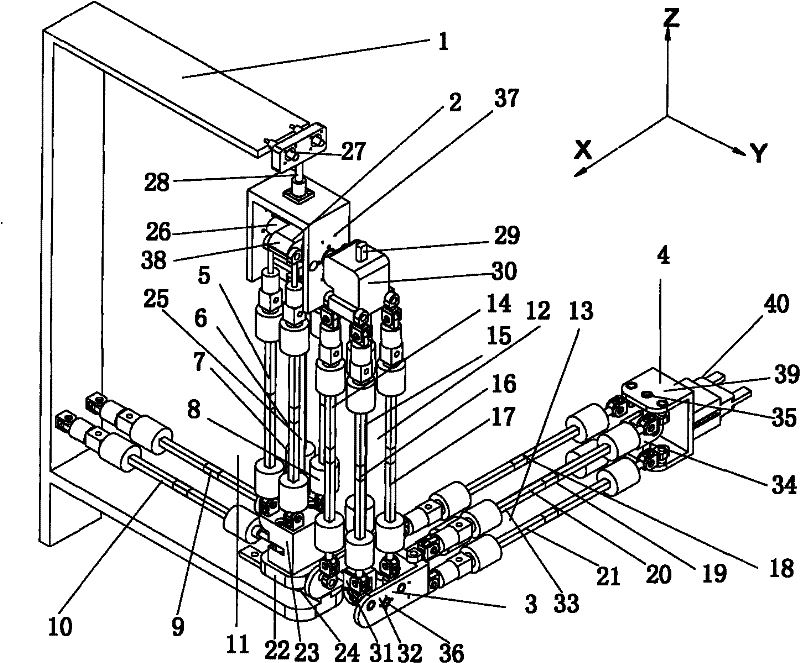
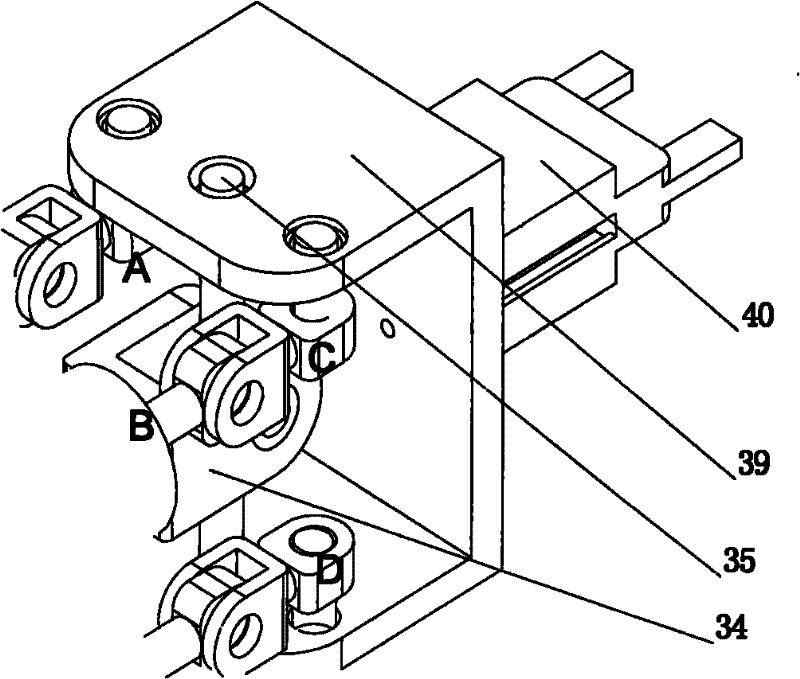
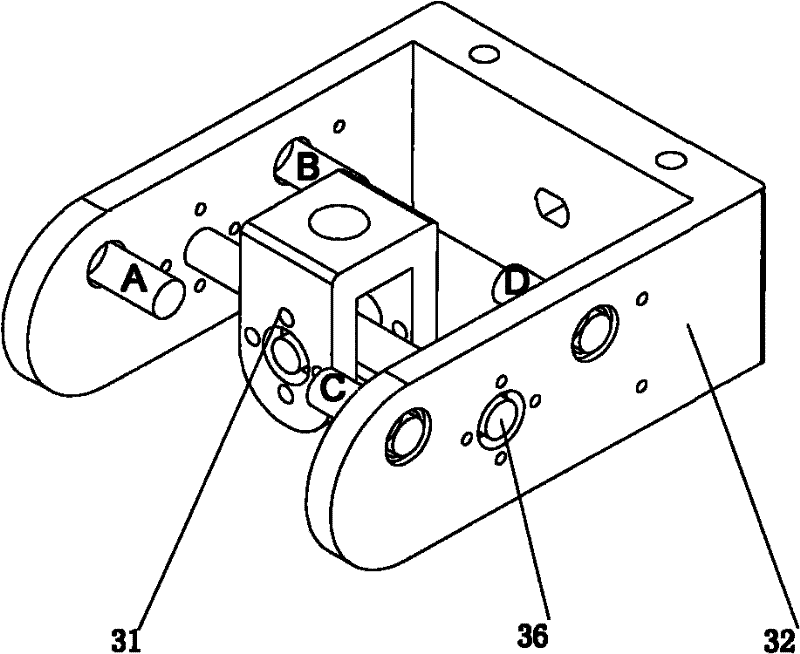
[0012] Such as Figure 1~3 As shown, the six-degree-of-freedom flexible robotic arm based on pneumatic muscles includes a fixed platform 1, a shoulder joint 2, an elbow joint 3, a wrist joint 4, a shoulder joint drive 11, an elbow joint drive 12, a wrist joint drive 13, and a shoulder joint drive 11 includes the first pneumatic artificial muscle 5, the second pneumatic artificial muscle 6, the third pneumatic artificial muscle 7, the fourth pneumatic artificial muscle 8, the fifth pneumatic artificial muscle 9, the sixth pneumatic artificial muscle 10, and the elbow joint drive 12 includes the first pneumatic artificial muscle The seventh pneumatic artificial muscle 14, the eighth pneumatic artificial muscle 15, the ninth pneumatic artificial muscle 16, the tenth pneumatic artificial muscle 17, the wrist joint drive 13 includes the eleventh pneumatic artificial muscle 18, the twelfth pneumatic artificial muscle 19, the tenth The third pneumatic artificial muscle 20, the fourte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More