

Active neutral point clamped multi-level four-quadrant elevator driving system and control method
A driving system and clamping technology, applied in the field of active midpoint clamping multi-level four-quadrant elevator drive system, can solve the problems of difficult control parameter optimization, large amount of calculation, non-global optimization, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The preferred embodiments will be described in detail below in conjunction with the drawings, but the scope of protection of the present invention is not limited to the embodiments.
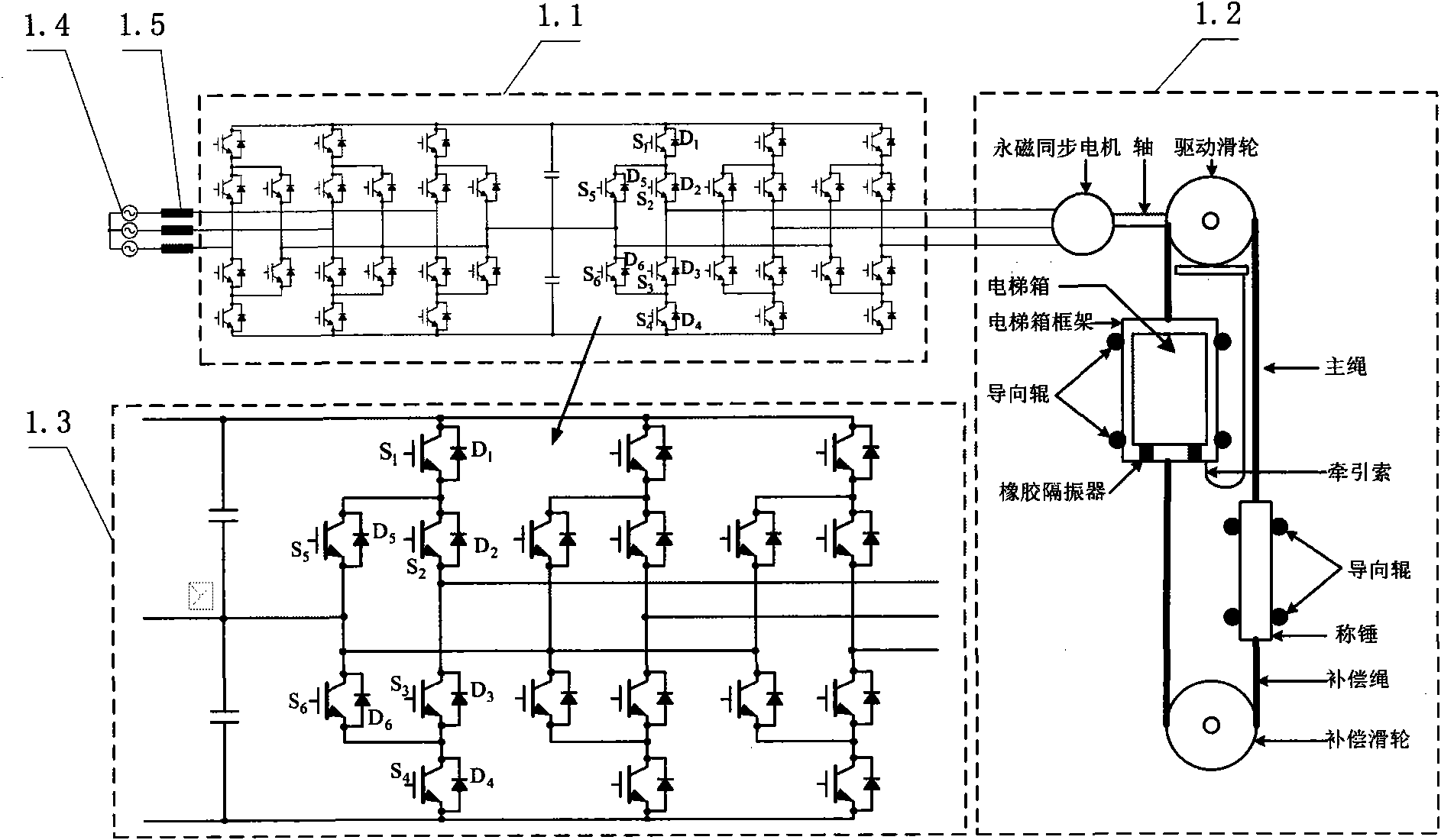
[0043] Such as figure 1 As shown, it is a schematic structural diagram of the active neutral point clamping multi-level four-quadrant elevator drive system based on chaotic parameter estimation state traversal predictive control proposed by the present invention, wherein 1.1 is an active neutral point clamping four-quadrant frequency conversion The device is used to drive the elevator transmission system 1.2. 1.3 is an enlarged schematic diagram of the structure of the active neutral point clamped multilevel inverter. 1.4 is the power grid, and 1.5 is the grid-connected inductance of the elevator drive system.
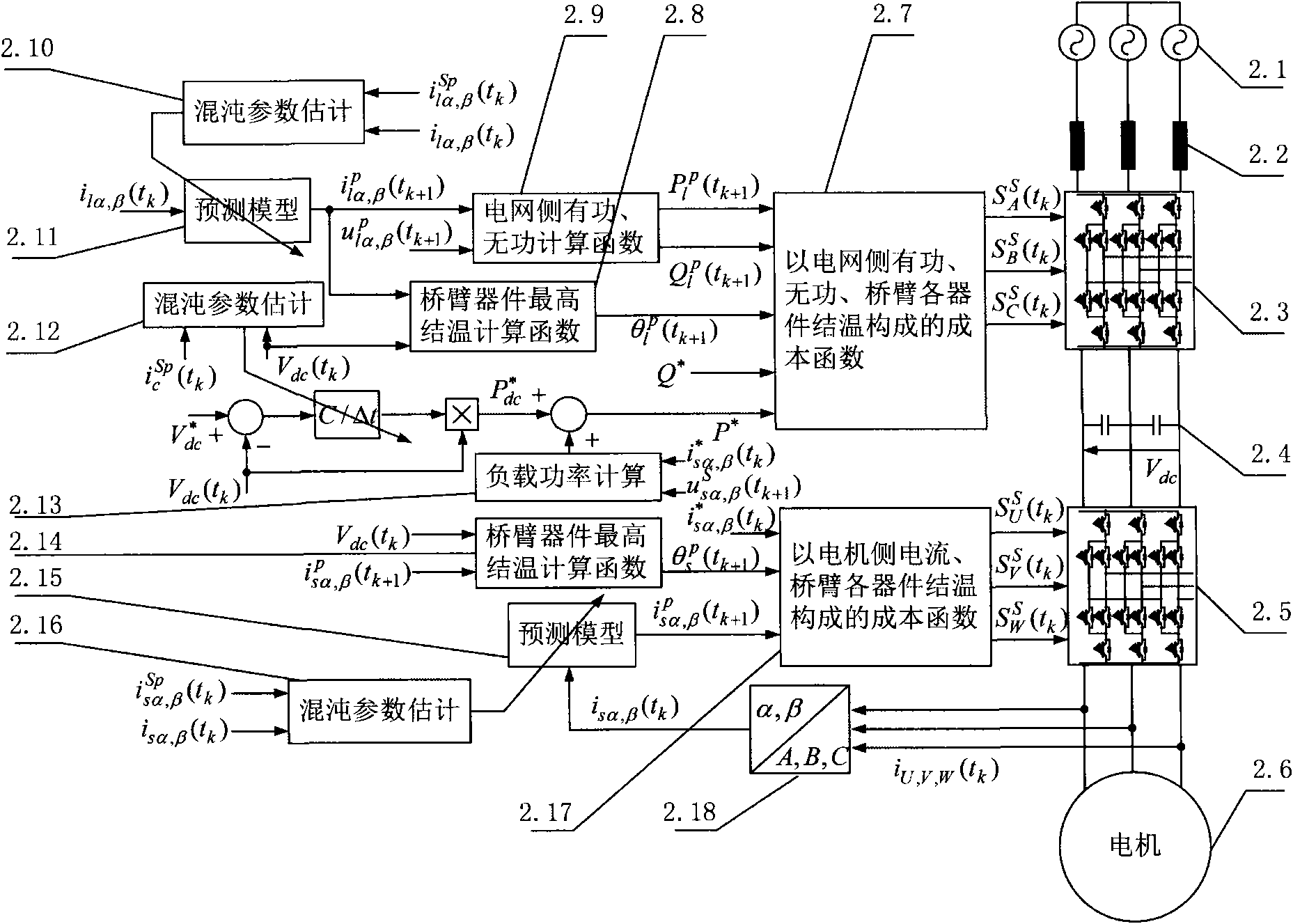
[0044] by figure 2 The active neutral-point clamped three-level four-quadrant drive based on the ergodic predictive control of switches based on chaotic parameter estimation sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More