

WLAN (Wireless Local Area Network) indoor KNN (K-Nearest Neighbor) positioning method based on near-neighbor point number optimization
A positioning method and technology of neighboring points, applied in the field of pattern recognition, can solve problems such as improper selection of neighboring points, deterioration of positioning accuracy, etc., and achieve the effect of improving effectiveness and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
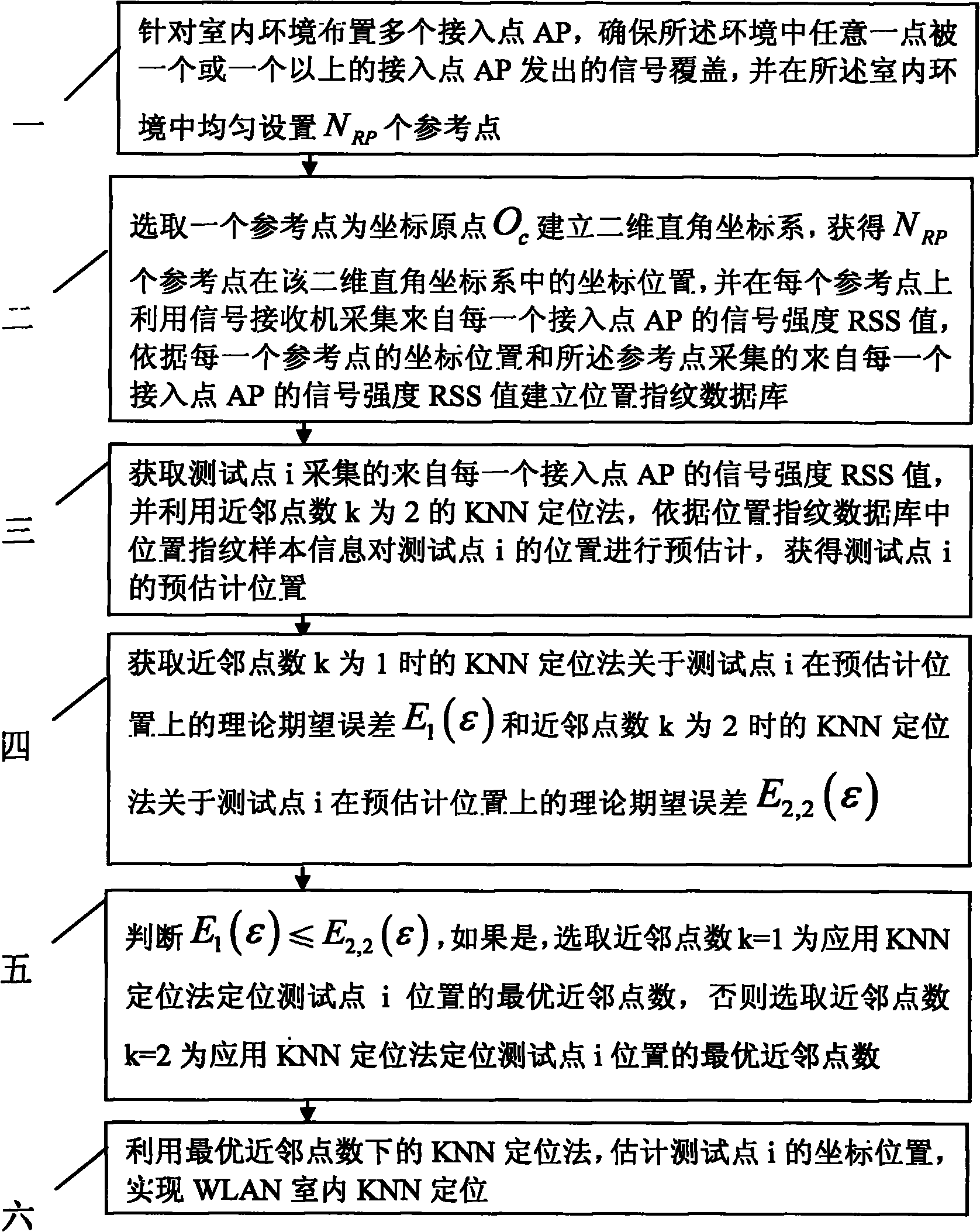
[0017] Specific implementation mode one: according to the instructions attached figure 1 and 5 Specifically illustrate this embodiment, the WLAN indoor KNN positioning method based on the optimization of neighbor points described in this embodiment, its positioning process is:
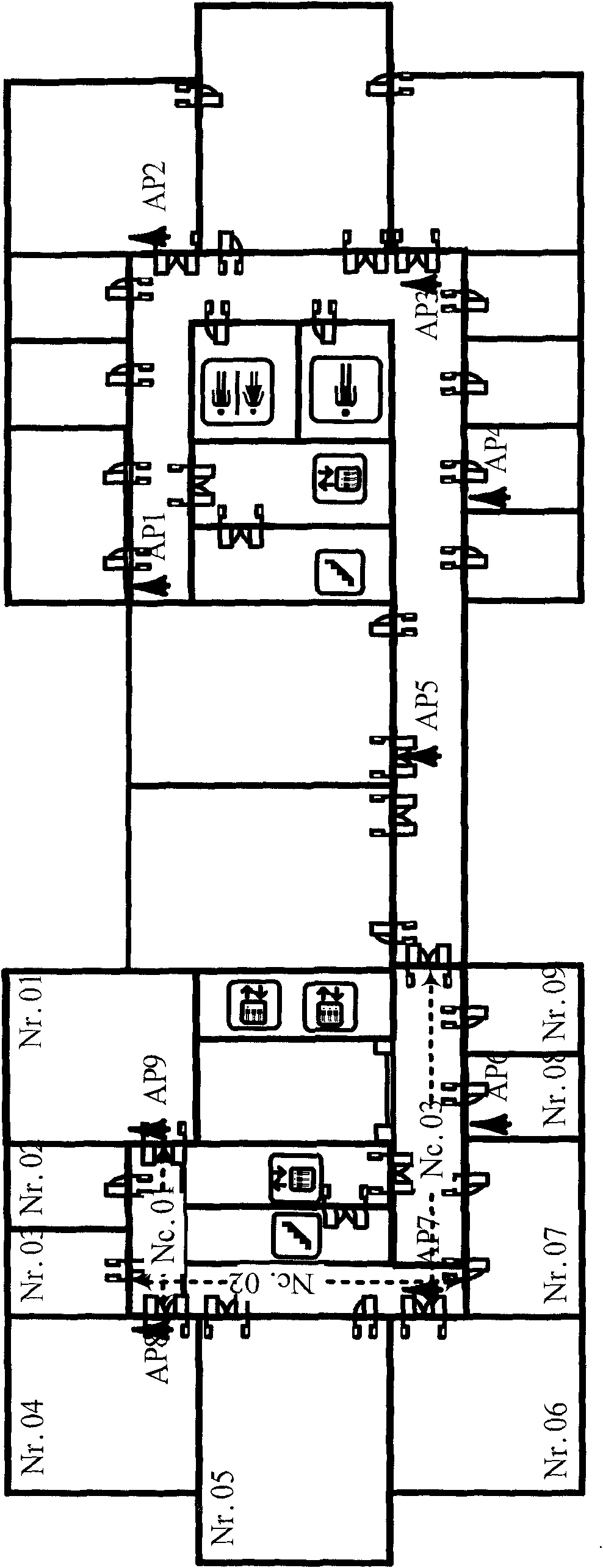
[0018] Step 1: Arrange multiple access points AP for the indoor environment, ensure that any point in the environment is covered by the signal sent by one or more access point APs, and uniformly set N in the indoor environment RP a reference point;
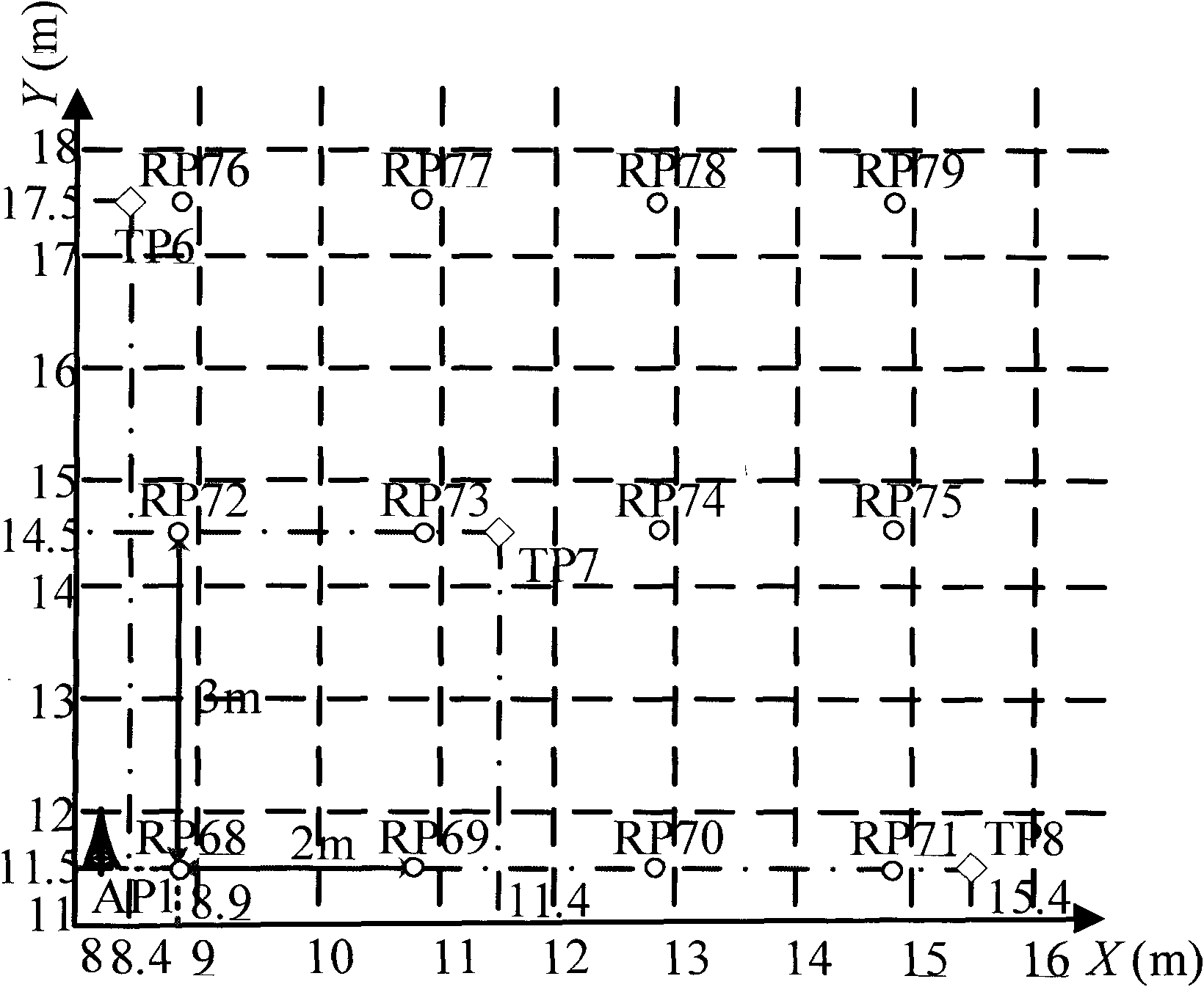
[0019] Step 2: Select a reference point as the coordinate origin O c Establish a two-dimensional Cartesian coordinate system to obtain N RP The coordinate positions of each reference point in the two-dimensional rectangular coordinate system, and use the signal receiver to collect the signal strength RSS value from each access point AP on each reference point, according to the coordinate position of each reference point and the correlation with each ref...
specific Embodiment approach 2
[0027] Specific implementation mode two: according to the instructions attached Figure 6 This embodiment is specifically described. This embodiment is a further description of the first embodiment. In the first embodiment, in step 4, the KNN positioning method when the number of neighbor points k is 1 is obtained. theoretical expectation error The specific method is:
[0028] Step 411: make the number of neighbor points k=1 in the KNN positioning method;
[0029] Step 412: Make the pre-estimated position of the test point i Positioning error is δ, ensure that P j -P T ≤P T -P j+1 ,in, And there are conditions: Confidence probability is obtained according to the stated conditions
[0030] Prob 1 , δ ( ϵ ) = 1 + r 8 N RP ( ...
specific Embodiment approach 3
[0036] Specific implementation mode three: according to the instructions attached figure 2 , 3 , 4, 7 and 8 specifically describe the present embodiment, and this embodiment is a further description of the specific embodiment one or two. In the specific embodiment one or two, in step four, the KNN positioning method when the number of neighbor points k is 2 is obtained About the theoretical expected error of the test point i in the pre-estimated position
[0037] E 2,2 ( ϵ ) = Prob 2,2 , d j + r 2 ( ϵ ) E 2,2 , d j + r 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More