

Mobile robot path planning method
A mobile robot and path planning technology, applied in the field of mobile robots, can solve problems such as difficult extraction of fuzzy rules and limitations of neural networks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention is further described in conjunction with the following examples.
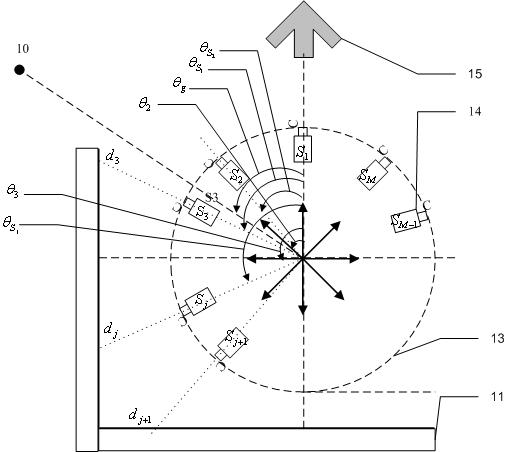
[0027] refer to figure 1 The model of the present invention illustrates an embodiment of the path planning method of the mobile robot, which includes the following steps.
[0028] A. Determine the moving target 10 of the robot 13; set the number of sensors 14 of the robot 13 M and the number of directions that the robot 13 can move forward N .
[0029] The sensor 14 is a hardware device configured by the robot 13, and is evenly arranged according to the 360° circumference of the robot 13 M indivual. Therefore, the j sensors S j direction angle , , .
[0030] The advancing direction of the robot 13 is set according to the rotatable angle of the actuator of the robot 13. The higher the accuracy of the actuator, the more the advancing directions. For a predetermined actuator, the number of directions that the robot 13 can move forward N It is fixed. When the forward di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More