

Regional depth edge detection and binocular stereo matching-based three-dimensional reconstruction method
A binocular stereo matching and edge detection technology, which is applied in the field of reconstructing the 3D point cloud model of the target, can solve problems such as differences, large impact on the reconstruction system, and impact on algorithm performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Referring to the accompanying drawings, specific embodiments of the present invention will be described in more detail below. The programming implementation tool uses Visual C++2003.net and OpenCV image processing function library. In the indoor environment, the human face with low texture and the watermelon with obvious unbalanced light are selected as the 3D reconstruction target.
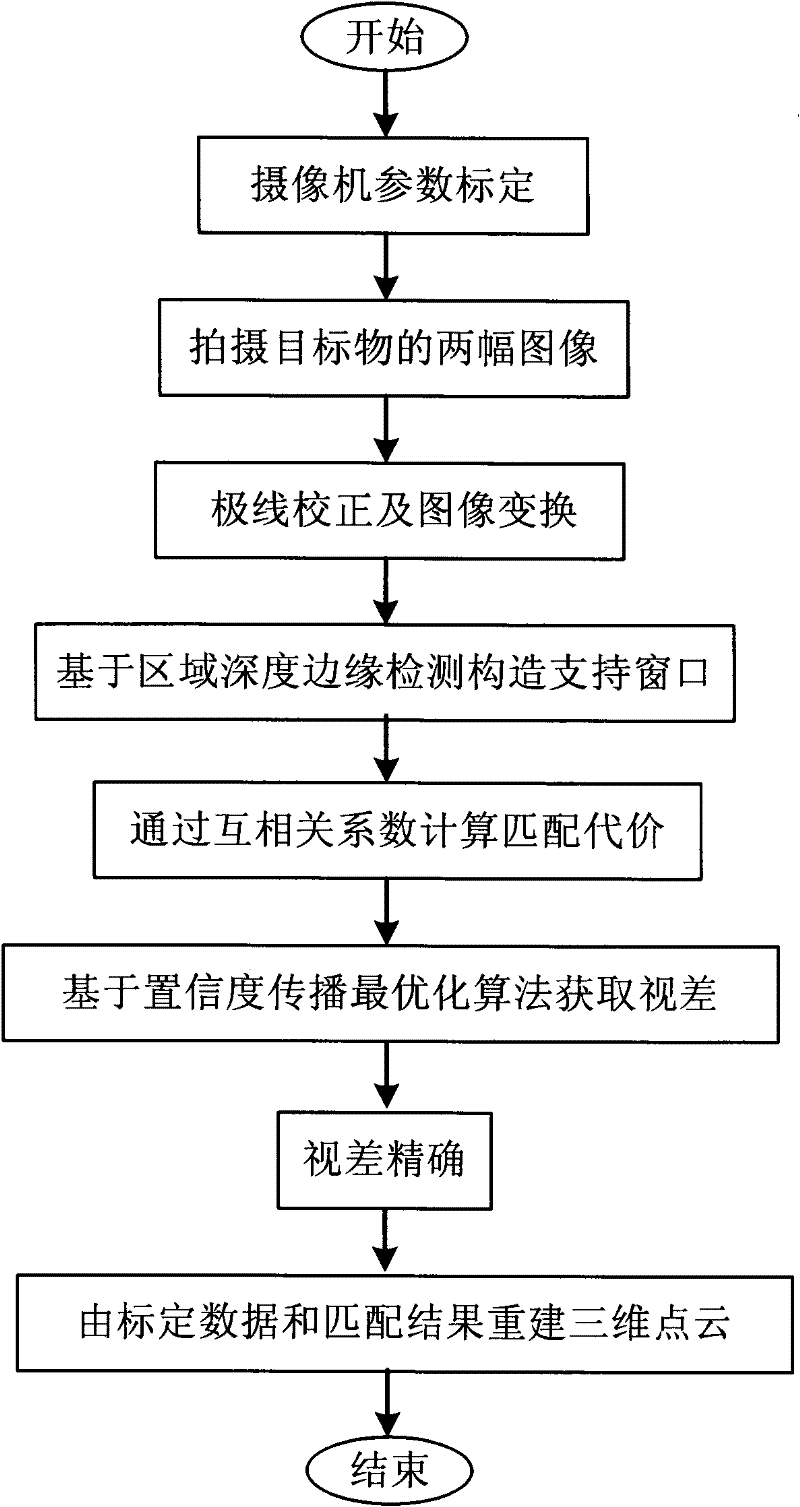
[0043] figure 1 It is a complete flow chart of the present invention.
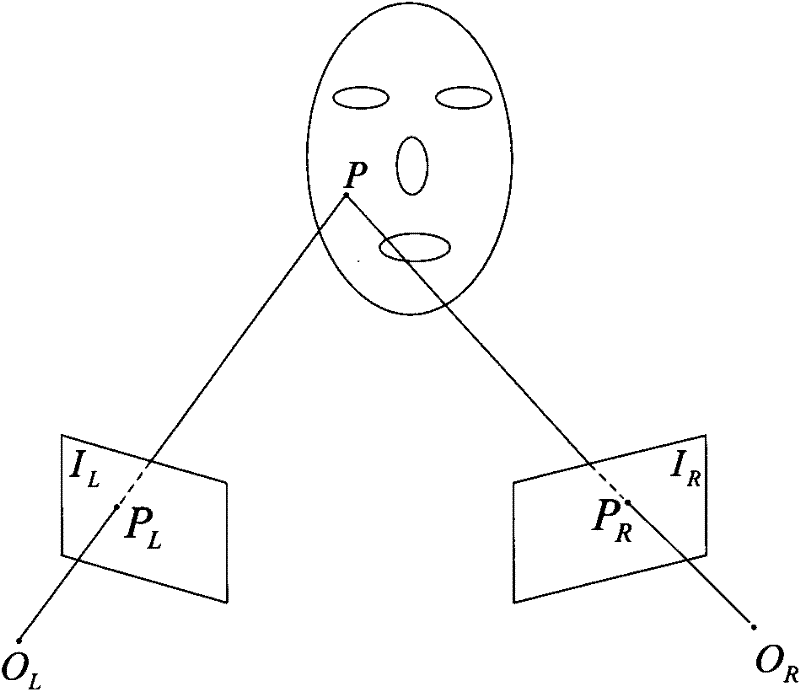
[0044] figure 2 It is a system model and a schematic diagram of the principle of the present invention. Use two CCD cameras to take a target image from two different angles at the same time, O L , O R are the optical centers of the two cameras, I L , I R are the imaging planes of the two cameras, P is a spatial object point on the object to be reconstructed, P L , P R are the image points formed by the object point P on the imaging planes of the two cameras. The image points formed by the same spatial object ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More