Object dimensional positioning method and camera
A 3D positioning and camera technology, applied in the field of image processing, can solve problems such as sensor quantization error and 3D coordinate jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] An embodiment of the present invention provides a three-dimensional positioning method for an object and a camera. The intersection line between the imaging plane of the image sensor and the horizontal plane is the X axis, the vertical line of the X axis on the imaging plane of the image sensor is the Y axis, and the vertical line of the imaging plane of the image sensor is Z axis, and the image sensors are arranged side by side along the X axis direction. Only the time-domain smoothing is performed on the Z-axis coordinates that are most sensitive to noise, so while ensuring the response speed of the X-axis and Y-axis coordinates, the jitter error of the entire system is reduced.
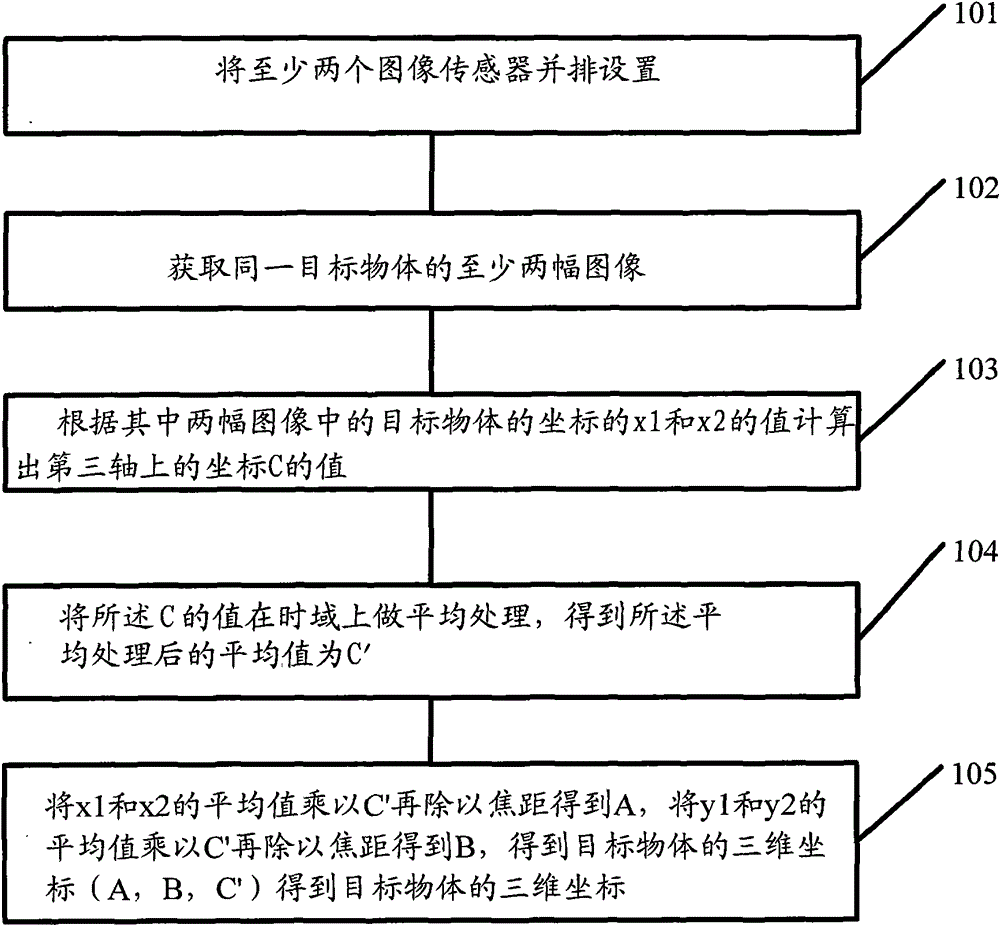
[0025] A method for three-dimensional positioning of objects, such as figure 1 shown, including steps:
[0026] 101. Arranging at least two image sensors side by side;
[0027] In this embodiment, there are two image sensors, and in other embodiments, there may be three or more image senso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More