

Camera-equipment-array based dynamic scene depth restoring method
A dynamic scene, depth recovery technology, applied in the field of computer vision, can solve the problems of time consistent constraint effects, spatiotemporal optimization effects need to be improved, spatial consistency constraints and time consistent constraints are not uniform in form, to achieve the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
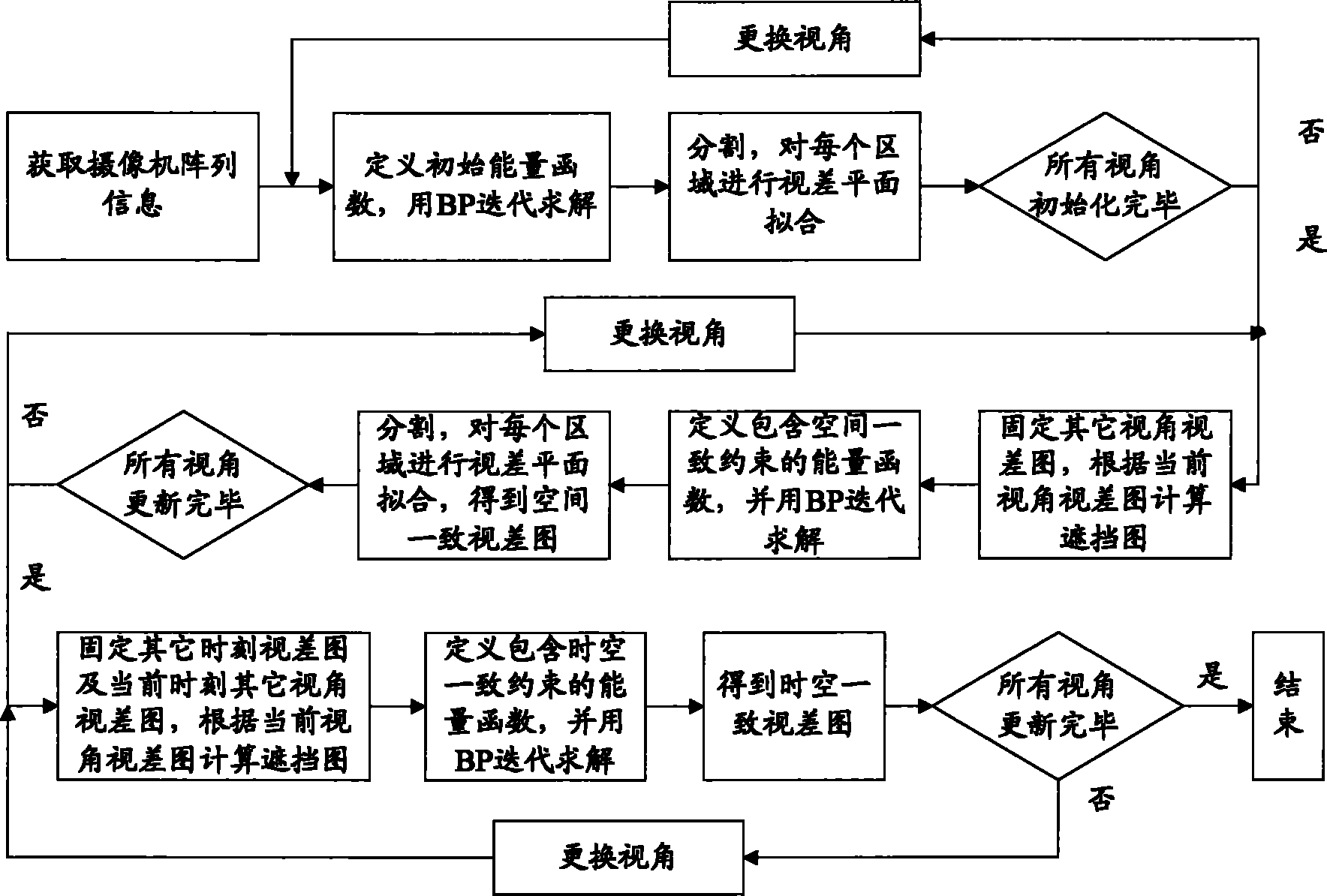
[0022] The present invention mainly lies in that the stability of the depth map sequence of each camera can be effectively ensured through uniform space-time and space-time constraints, and at the same time, multi-time depth information is used to correct single-time errors.
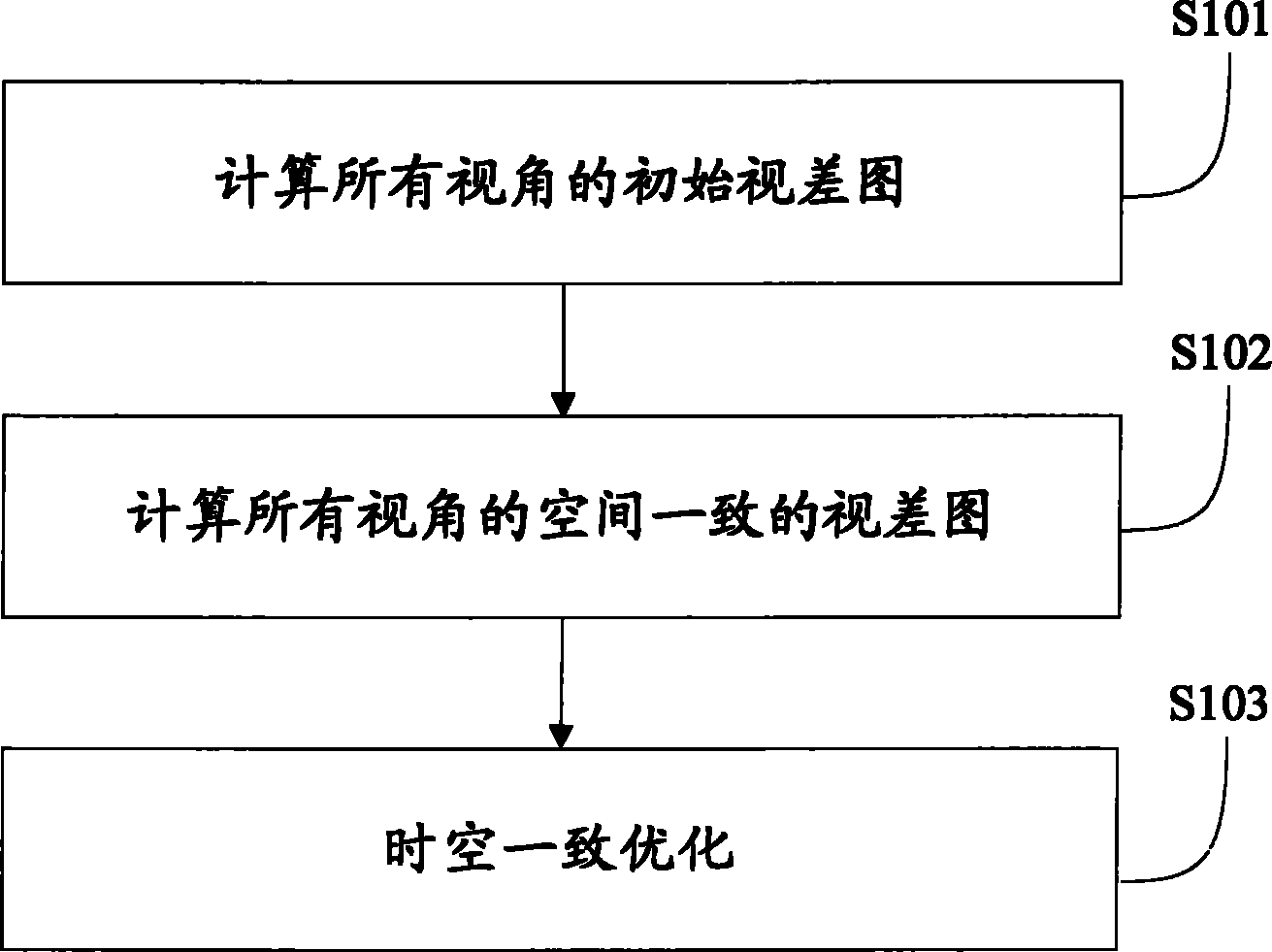
[0023] In order to achieve the above object, an embodiment of the present invention proposes a dynamic scene depth restoration method based on a photographing device array. figure 1 A flow chart of the above-mentioned dynamic scene depth restoration method is shown...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More