

Wheel-type obstacle detouring mechanism for wall climbing robot with adjustable magnetic adsorption force
A wall-climbing robot and adsorption mechanism technology, applied in the field of robots, can solve the problems of low utilization rate of magnetic energy, large movement steering resistance, small magnetic adsorption force, etc., and achieve improved magnetic energy density and magnetic adsorption force of magnets, optimized design, better and better The effect of disability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
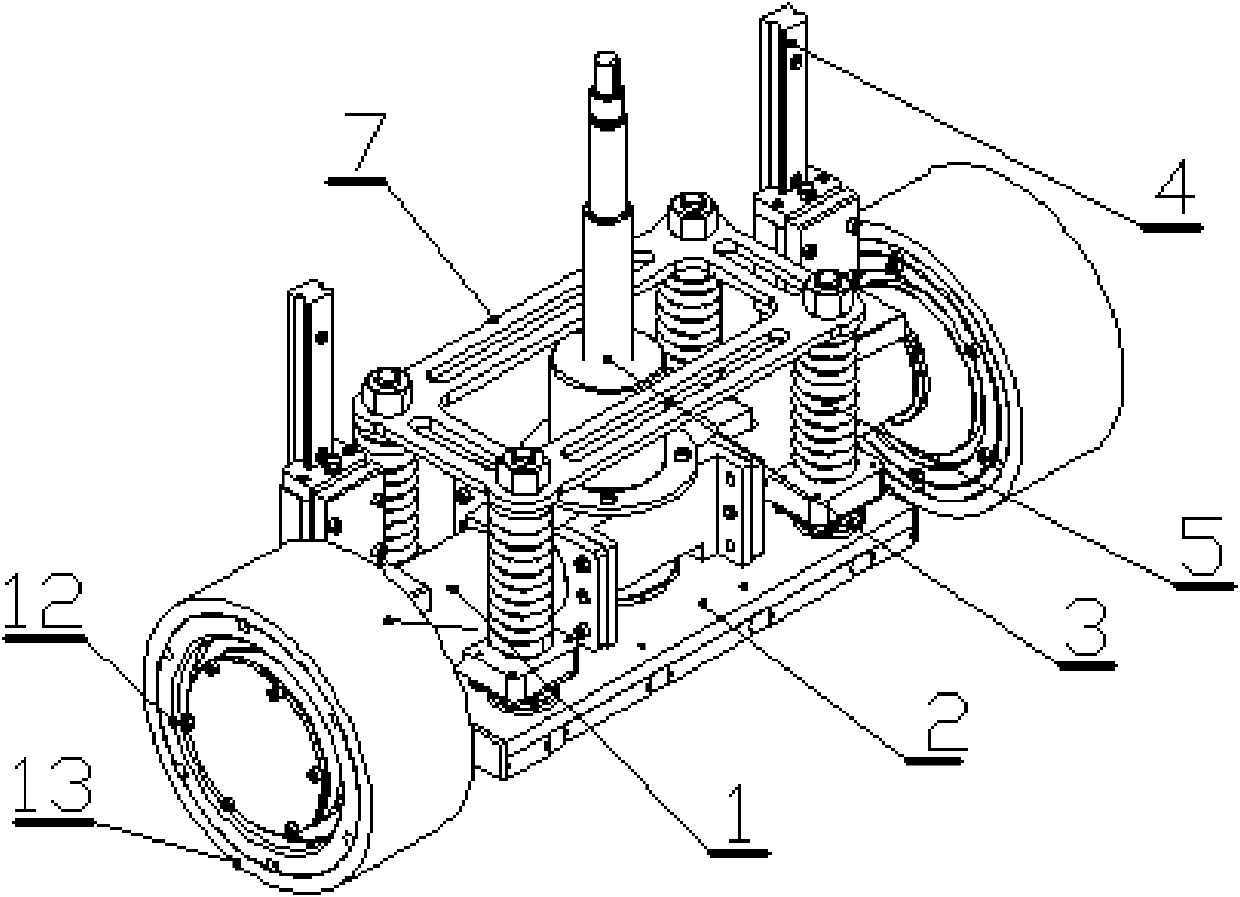
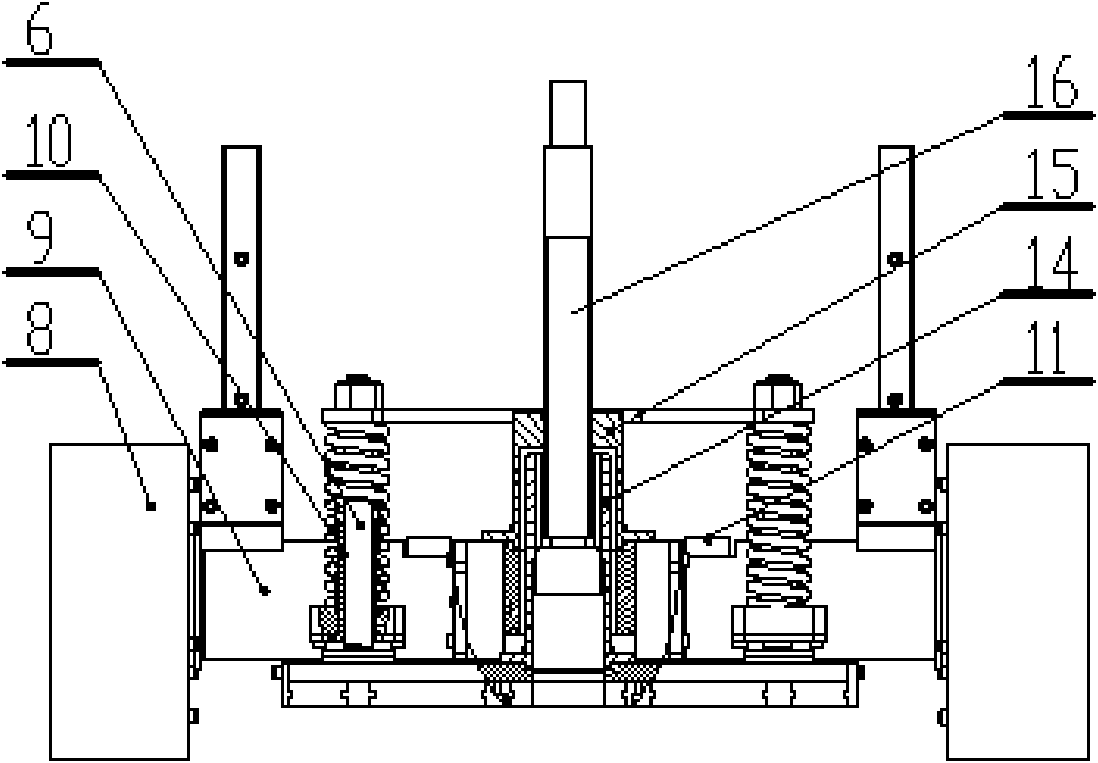
[0024] like figure 1 and figure 2 As shown, this embodiment includes: a moving mechanism 1, an adsorption mechanism 2, a lifting mechanism 3, a linear guide rail 4, a spring 5, a sliding guide rod 6 and a guide rod connection frame 7, wherein: the adsorption mechanism 1 is placed through the sliding guide rod 6 The driving mechanism 1 is lowered and forms a movable connection, the spring is sleeved on the sliding guide rod, the connecting frame of the guide rod presses the spring and connects the sliding guide rod together, the lifting mechanism 3 forms a movable connection with the moving mechanism 1 and the ads...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More