

Hedgerow pruning manipulator with six degrees of freedom (DOP)
A manipulator and degree-of-freedom technology, which is applied to equipment for trimming hedges, etc., can solve the problems of limited adaptability to trimming conditions, difficult to implement control systems, and unsatisfactory trimming quality. reduced effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
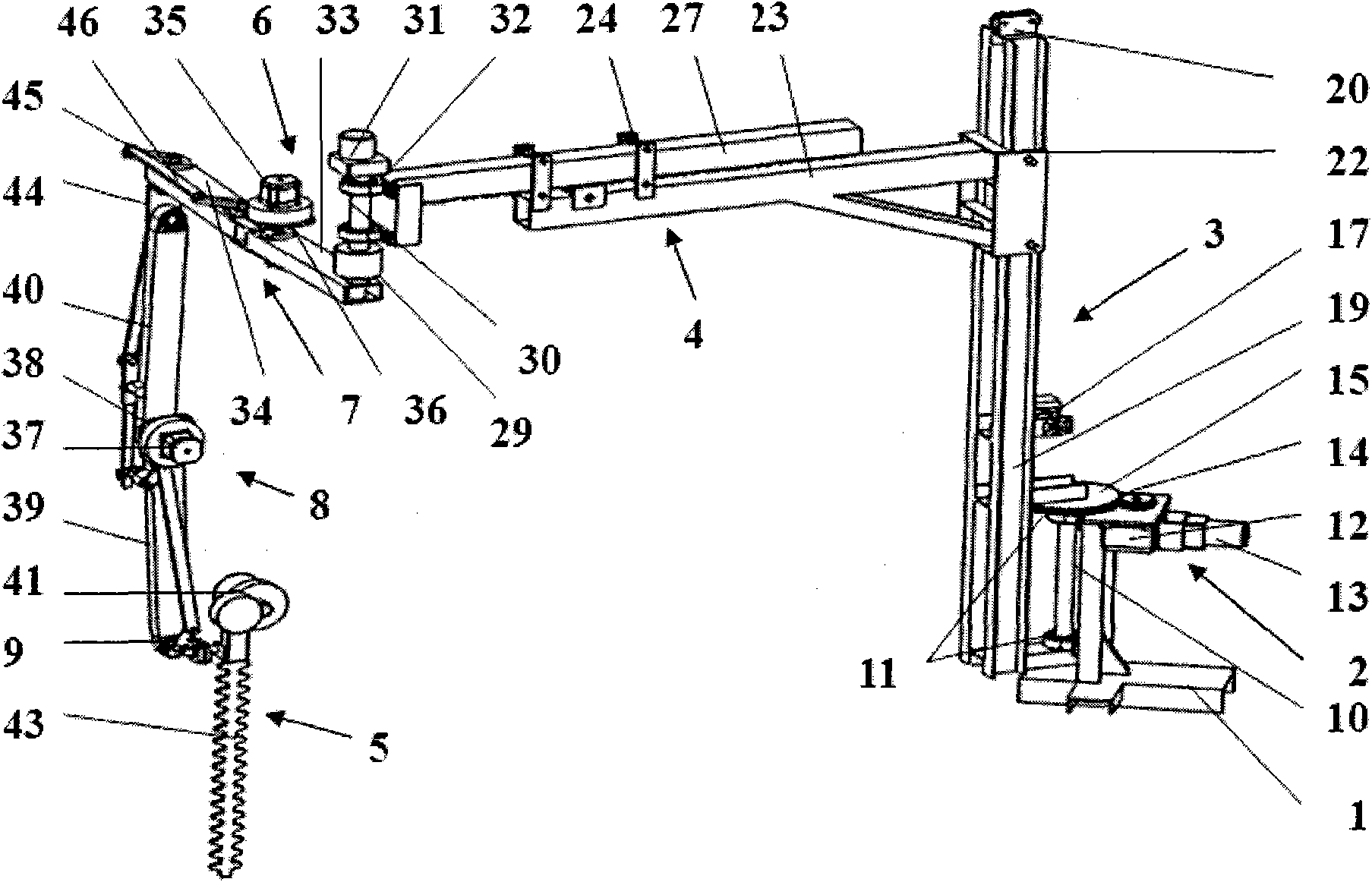
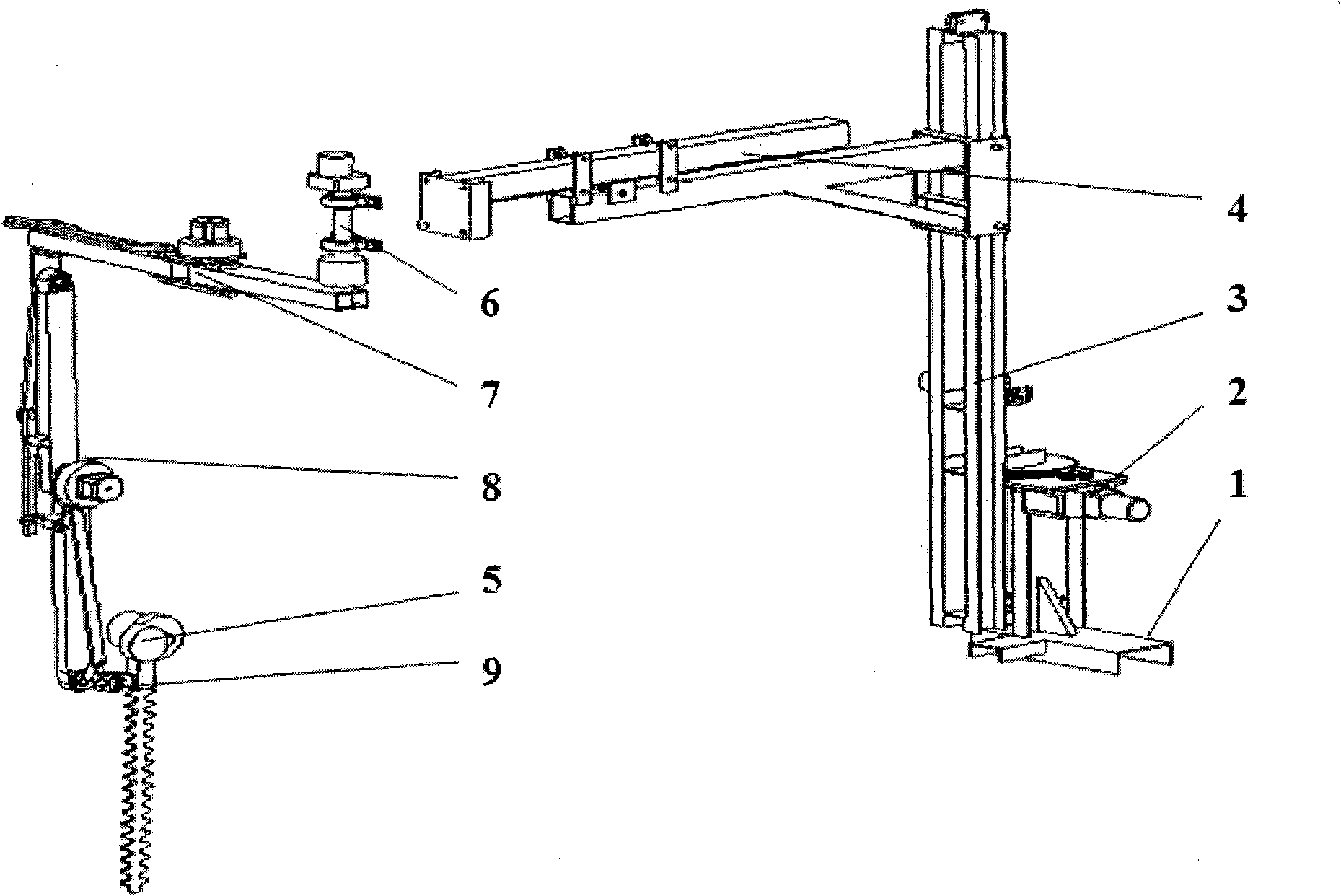
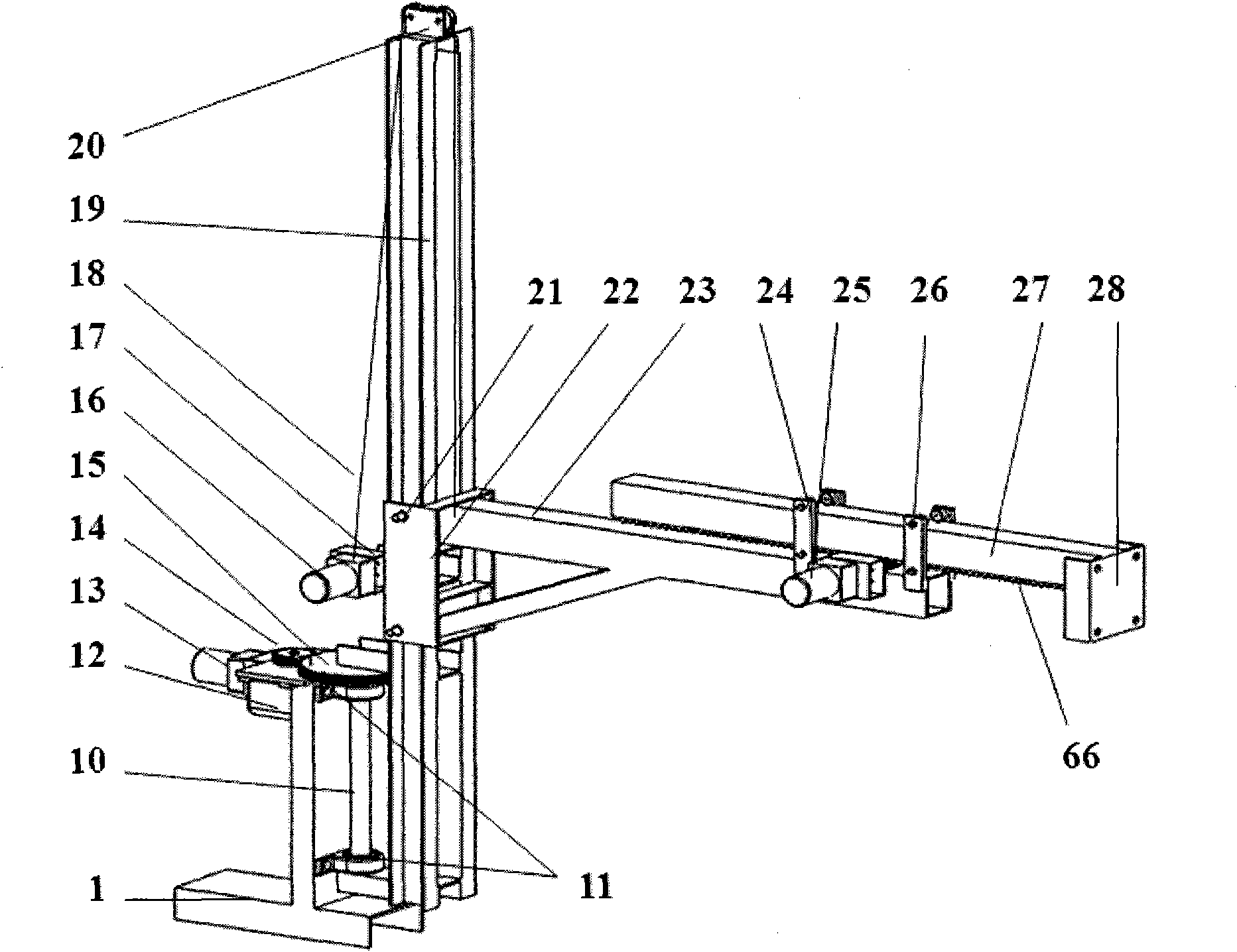
[0038] control figure 1 and figure 2 The six-degree-of-freedom hedgerow seedling pruning manipulator of the present invention includes a pruning mechanism composed of a pruning knife assembly 5, a main rotary mechanism 6, a horizontal mechanical arm 7, and a vertical mechanical arm 8. The manipulator is also provided with a The supporting mechanism is composed of base 1, rotating part 2, lifting part 3 and telescopic part 4. The base 1 is fixed on the traction vehicle, and the base 1 is provided with a rotating part 2. Turn out to the outside of the car, and it can be recovered in the car after trimming is completed. The main rotary mechanism 6 is fixedly installed on the front end of the telescopic part 4 of the support mechanism, and the horizontal mechanical arm 7 is fixed at the output end of the main rotary mechanism 6. Mechanical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More