

Cable-climbing robot
A technology of a robot and a tensioning mechanism, applied in the field of robots, can solve the problems of complex structure, great influence of working environment, low detection efficiency, etc., and achieve the effects of simple structure design, good versatility and convenient maintenance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
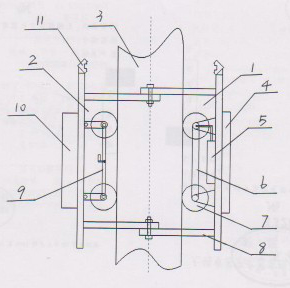
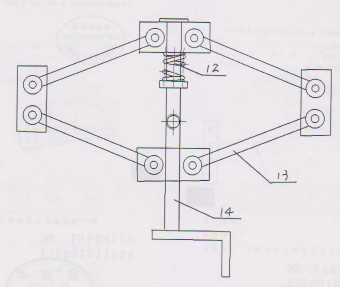
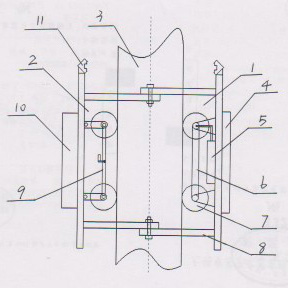
[0013] see figure 1 , figure 1 It is a schematic structural diagram of the rope climbing robot of the present invention. Depend on figure 1 It can be seen that the rope climbing robot of the present invention includes an active trolley 1 and a driven trolley 2. The active trolley 1 and the driven trolley 2 are arranged symmetrically on the left and right sides. Both the active trolley 1 and the driven trolley 2 have two wheels 7. The trolley 1 and the driven trolley 2 are connected to each other through a connecting piece, and a four-link tensioning mechanism 9 is arranged on the driven trolley 2. The structure of the four-link tensioning mechanism 9 is as follows: figure 2 , including four connecting rods 13, an adjusting screw 14, an adjusting nut and an adjusting spring 12, the four connecting rods 13 are connected into a parallelogram structure by four connecting pieces, and the adjusting screw 14 is threadedly connected in two of them. The adjusting screw 14 is provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More