Integrated-navigation and control hardware-in-the-loop simulation test system of underwater vehicle
An underwater vehicle, semi-physical simulation technology, applied in general control systems, control/regulation systems, navigation through speed/acceleration measurement, etc. system linear acceleration signal simulation problem, to achieve the effect of more practicability, small integral error and reduced error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The semi-physical simulation experiment of the navigation control system of the underwater vehicle is completed by using the invention.
[0040] (1) System composition
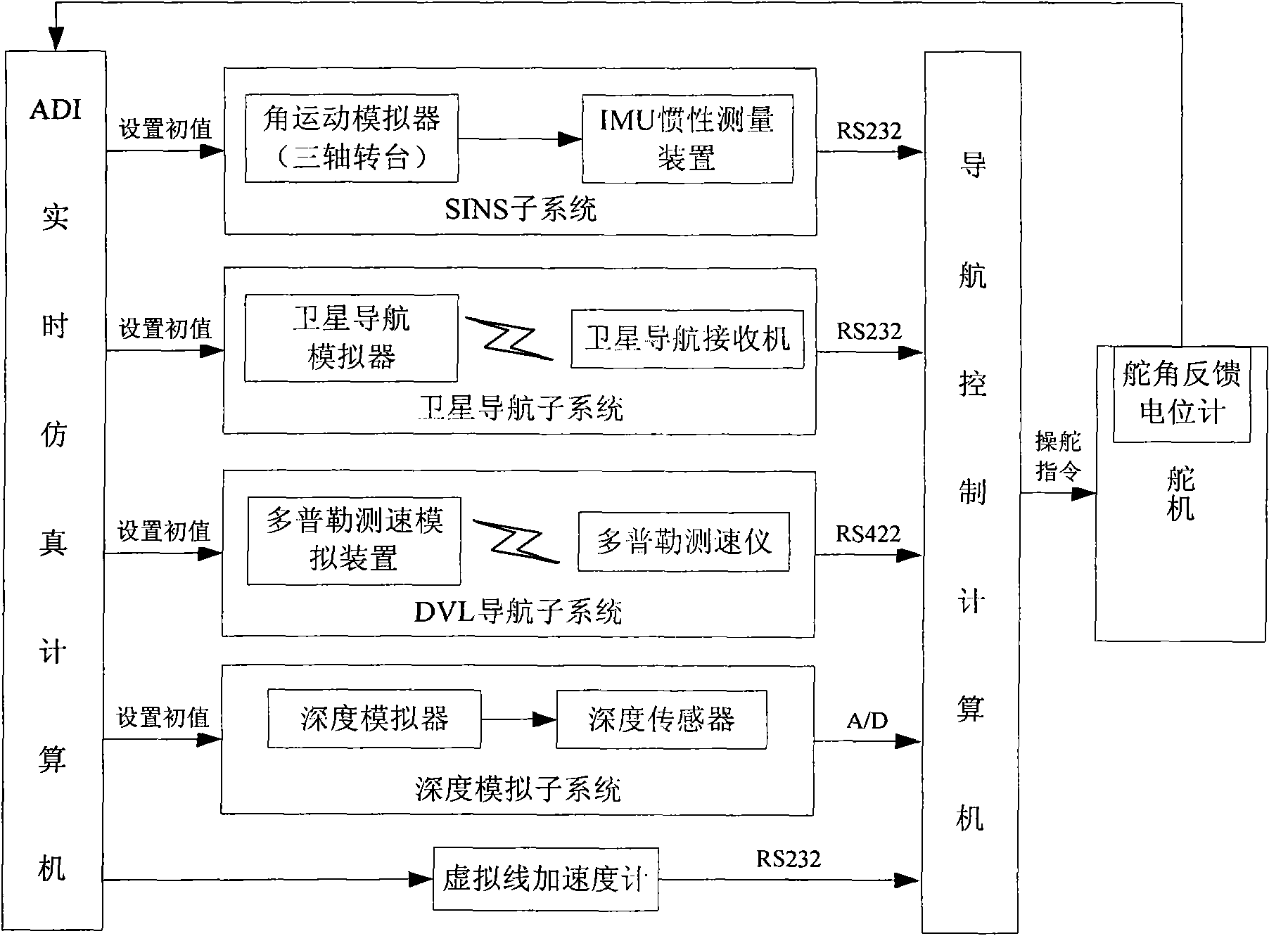
[0041] The underwater vehicle integrated navigation and control semi-physical simulation test system consists of IMU inertial measurement device, Doppler speedometer, depth sensor, satellite navigation receiver and steering gear components and other components in kind, ADI real-time simulation computer, Doppler speed simulation Device, depth simulator, angular motion simulator, satellite navigation simulator, virtual line accelerometer and other simulation equipment and navigation control computer. When the underwater vehicle navigates underwater, it adopts the SINS+DVL integrated navigation method; when it navigates on the water surface, it adopts the SINS+GPS / Beidou (GPS / BD) integrated navigation method.
[0042] The working principle of the system is:
[0043] First, the ADI real-time simulation co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com