

Motion control method of lower limb rehabilitative robot
A technology of robot motion and control method, which is applied to sports accessories, gymnastics equipment, passive exercise equipment, etc. to achieve the effect of enhancing active consciousness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
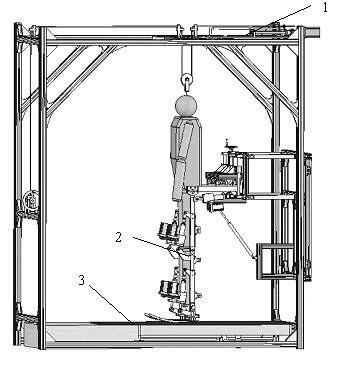
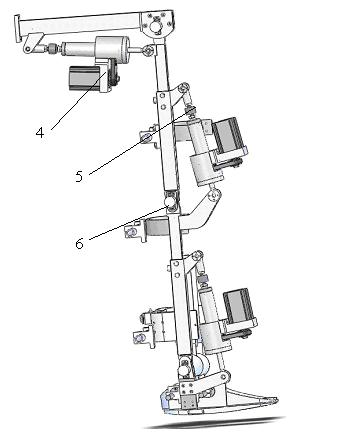
[0022] Preferred embodiments of the present invention are described as follows in conjunction with the accompanying drawings: see figure 2 , The robot system for lower limb rehabilitation training in this embodiment consists of a weight loss device 1, an exoskeleton gait orthosis 2, a treadmill 3 and a control cabinet. The exoskeleton gait orthosis is designed as two exoskeleton-like mechanical legs (see image 3 ), each mechanical leg has three degrees of freedom: hip flexion / extension, knee flexion / extension, and ankle plantarflexion / dorsiflexion, which can simulate the rotation of the three joints in the sagittal plane during walking to achieve three For the movement of degrees of freedom, a ball screw linear driver 4 is installed at each joint to drive the movement of each joint of the orthosis. The walking rehabilitation training system provides patients with single-joint movement and walking rehabilitation movement of each joint from the perspective of rehabilitation m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More