

Reconfigurable device for walking robot with four/two parallel legs
A walking robot and robot technology, applied in the field of robots, can solve the problems of large inclination, poor stability, loss of safety of passengers, etc., and achieve the effect of good application prospect, comprehensive performance improvement, and good static and dynamic stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Provide the specific embodiment of the present invention below, and illustrate with reference to accompanying drawing.
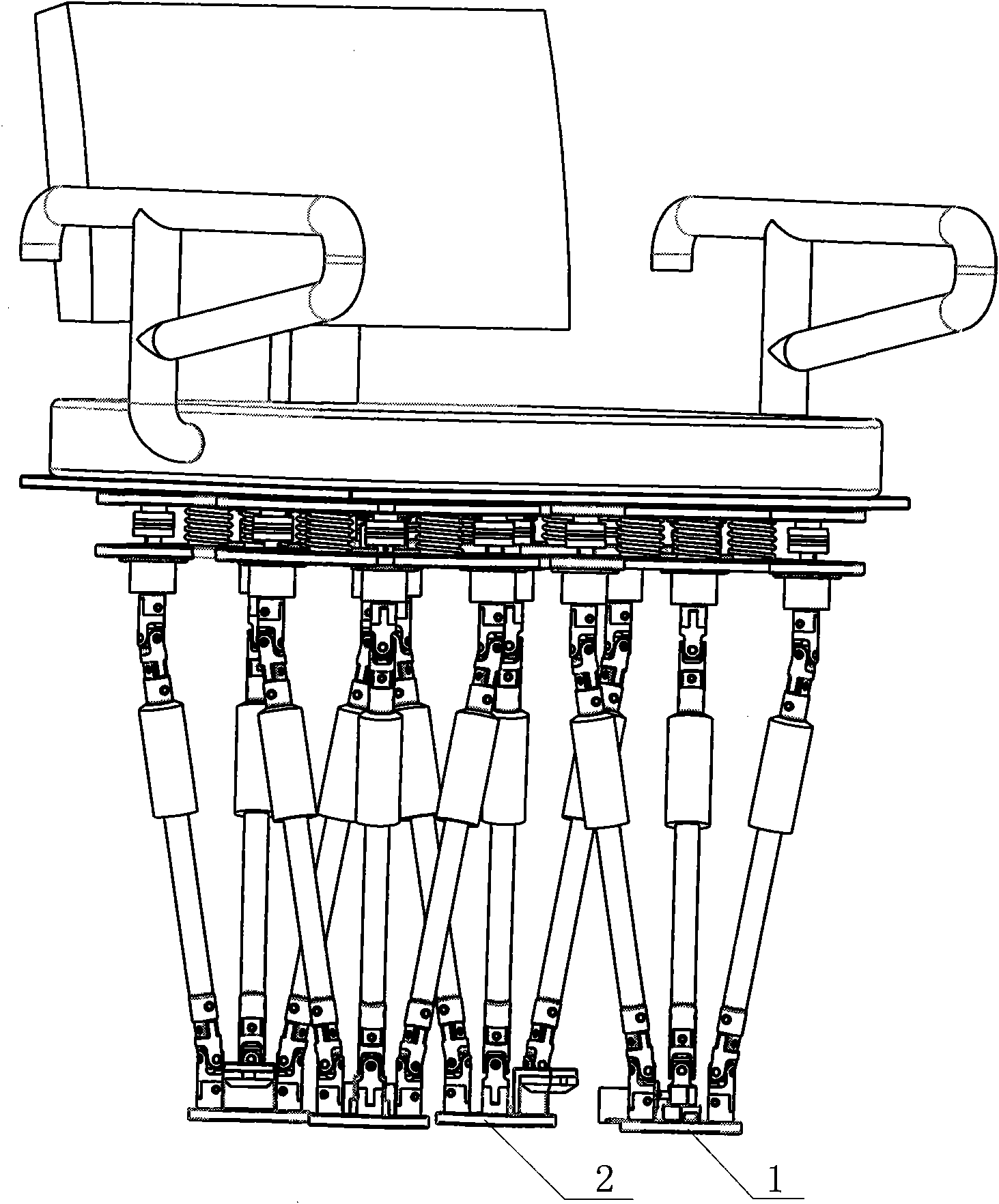
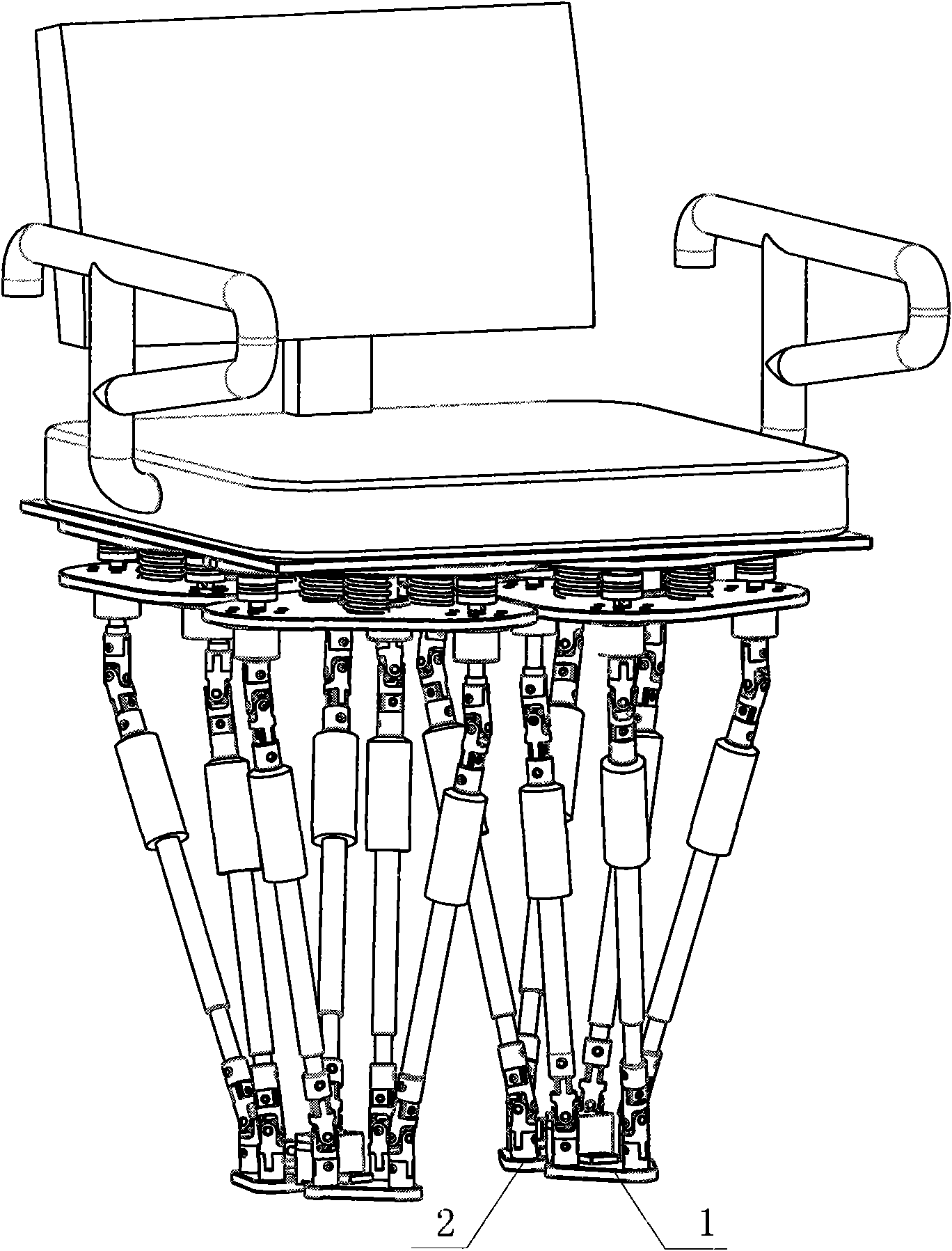
[0021] The invention is a mechanical structure design of a reconfigurable device for a quadruped / biped parallel-legged walking robot, that is, a design for realizing mutual conversion between a quadruped robot and a biped robot. The reconfigurable device includes a rotary pair stop device and a merge device. The specific implementation scheme of robot reconstruction is: when walking on four legs (such as figure 1 As shown), the merging device is separated, and the rotating pair stop device locks the rotating pair connected with the upper platform in the 3-SPU, and each leg mechanism is a 3-UPU mechanism. When walking on two legs (such as figure 2 shown), the revolving pair stop device opens the locked revolving pair in the 3-SPU to form a six-degree-of-freedom 6-SPU leg mechanism, and then the foot platforms of the left and right sides of the quadr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More