

Pneumatic single tow rope multi-joint flexible manipulator with damping
A pneumatic and manipulator technology, applied in the field of flexible manipulators, can solve the problems of difficult manipulators, difficult calculation and control, damage, etc., and achieve the effect of rapid movement, low use environment requirements, and agile movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
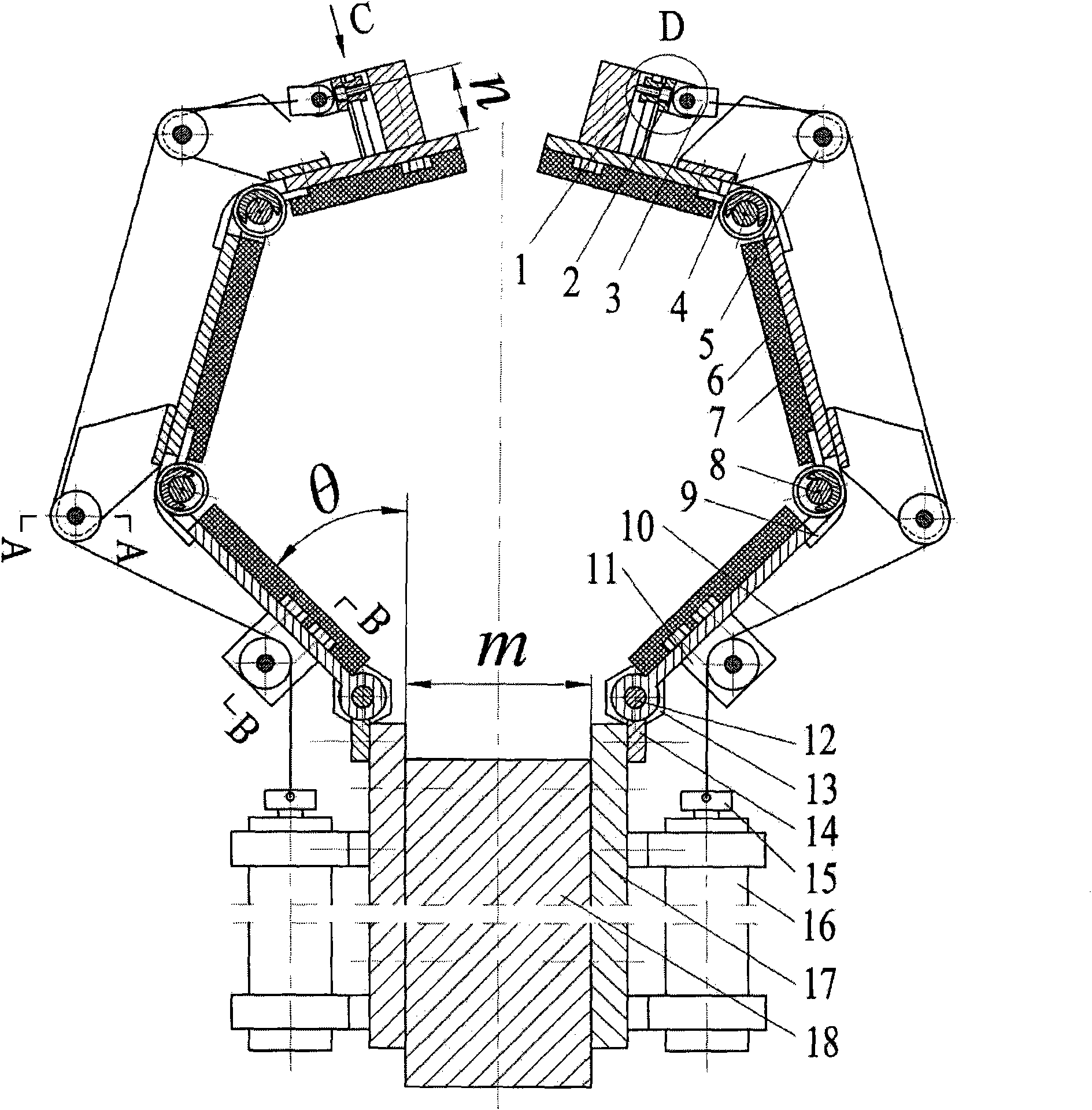
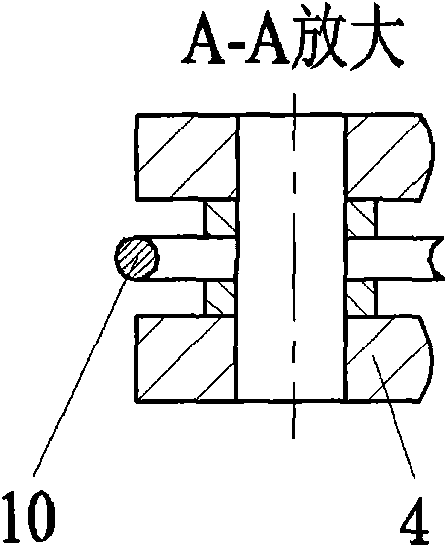
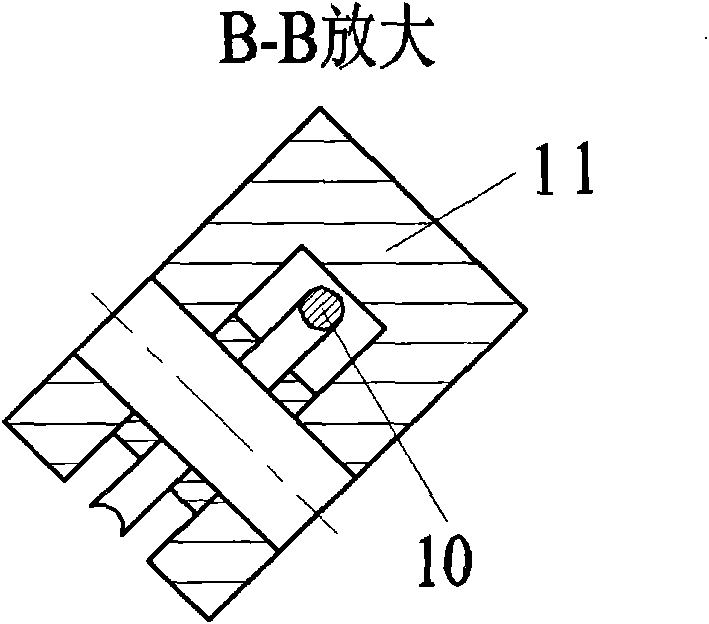
[0022] The damped pneumatic single-rope traction multi-joint flexible manipulator of the present invention consists of a guide groove seat 1, a small hinge support 2, a small hinge 3, a guide wheel bracket 4, a guide wheel 5, a buffer rubber 6, and a three-leaf series hinge 7, Three loose-leaf series hinge mandrel 8, torsion spring 9, traction rope 10, guide wheel seat 11, adjustable hinge mandrel 12, adjustable hinge lock nut 13, adjustable hinge support 14, traction rope fixing nut 15, cylinder 16, base plate 17, thickness changeable manipulator base 18 constitute.
[0023] The pneumatic part of the pneumatic single-rope traction multi-joint flexible manipulator with damping of the present invention is composed of a two-position four-way valve 19, a cylinder 20, a damping spring 21, an adjustable flow valve 22, a muffler 23, and a two-position on-off valve 24.
[0024] Be the working principle and working process of the present invention below:
[0025] In order to meet the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More