

Dielectric electroactive polymer (EAP) driver-based vertical jumping mechanism of robot
A robot and driver technology, applied in the field of bouncing robots, can solve the problems of low obstacle crossing efficiency and insurmountable movement form, and achieve the effects of high movement reliability, improved obstacle crossing ability and range of activities, and simple structure design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Below in conjunction with accompanying drawing, the present invention will be further described:
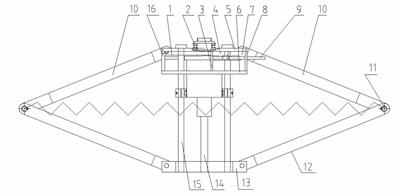
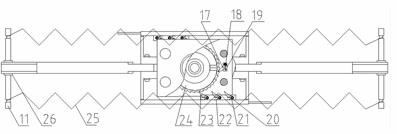
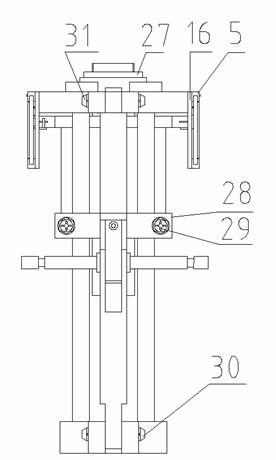
[0022] A vertical bounce mechanism of a robot, comprising a dielectric type EAP driver 7, a central cylindrical cam 24, a pawl ratchet mechanism, a reverse stop pawl component (including a stop pawl 17, two first small cylindrical pins 18, Support plate 19, spring wire 22), six-bar mechanism (including upper cover plate 1, base 13, upper inclined rod 10, lower inclined rod 12), central guide post 14, four side guide posts 15, cross bar 28, pull Stretch spring 25. Electrodes 4 are coated on the front and rear sides of the dielectric type EAP driver 7 . The upper end of central cylinder cam 24 is made with ratchet structure. The crossbars 28 are fixedly installed on the four side guide posts 15, and the middle of the two crossbars 28 are respectively processed with protruding rods, and the protruding rods on the crossbars 28 cooperate with the grooves of the central cylind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More